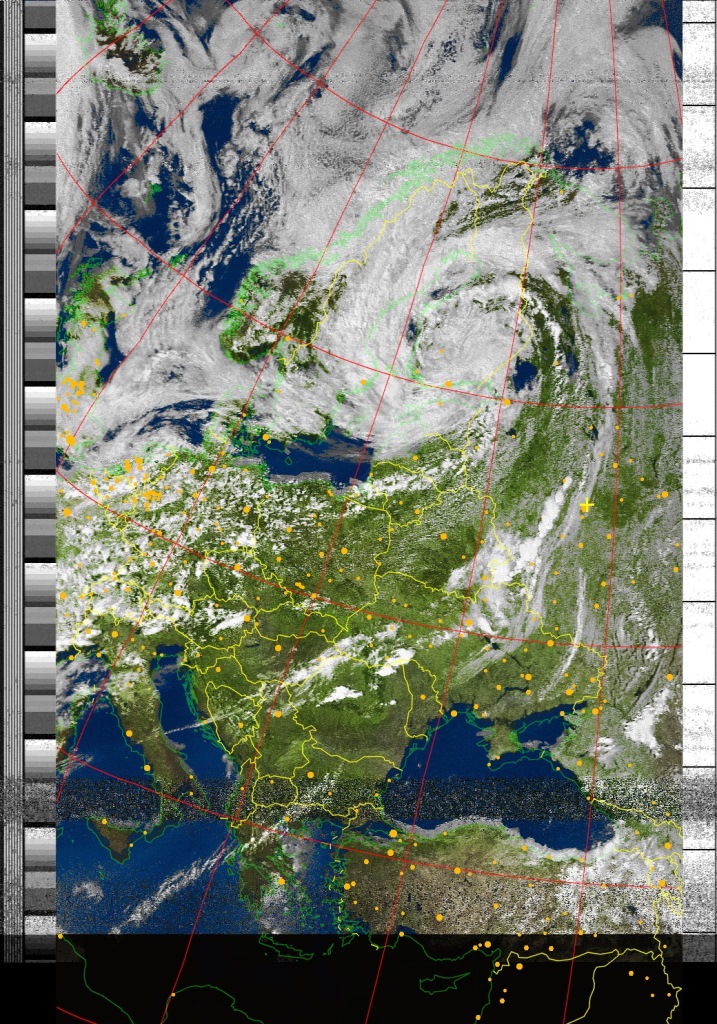
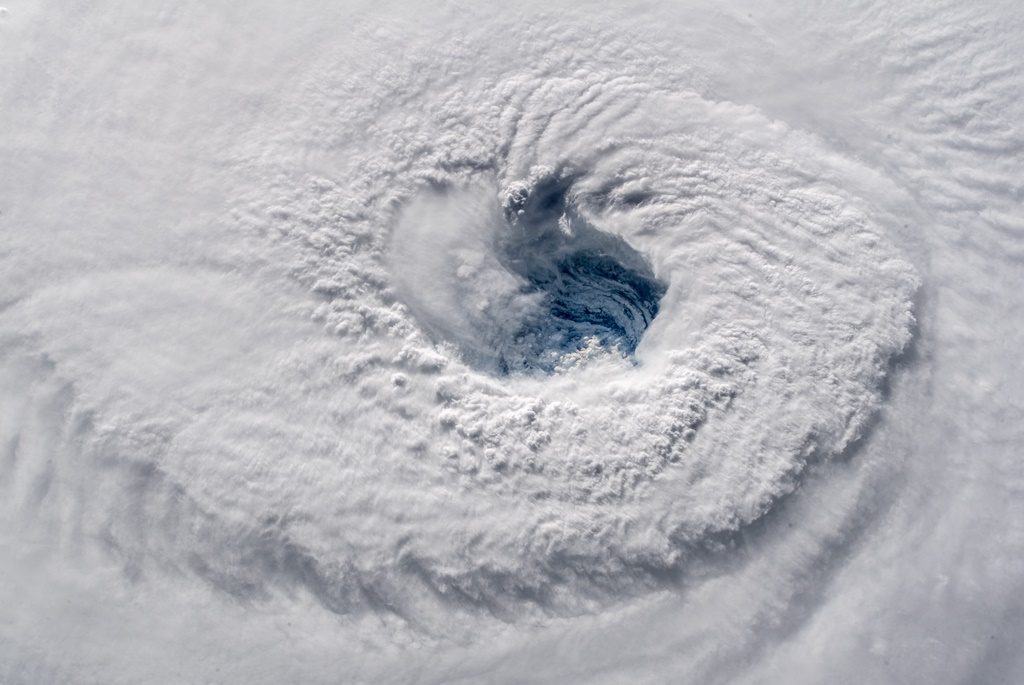
На полученных нами снимках из космоса видны вихри из облаков. Что заставляет облака закручиваться в вихрь, в каком слое атмосферы это происходит, и вообще, откуда берутся облака? Может быть появление облаков связано в самими вихрями?
DHT - 11 (22)Датчик температура и влажности. Подключение к Arduino, описание, библиотеки Adafruit
BMP-280Датчик атмосферного давления. Подключение к Arduino, описание, библиотеки Adafruit
Возьмёмся за исследование атмосферы с помощью Arduino, датчиков DHT-11 и bmp280, следим за влажностью воздуха, его температурой и давлением. Почему-то датчику нужна температура, чтобы выдать значение влажности? Как-же это, ведь он просто должен её измерить?
Ладно, что же такое влажность – это влага в атмосфере, её количество – бойко отвечают ученики. Хорошо, это абсолютная влажность – количество молекул воды в кубике воздуха. (Там, кстати, ещё много других молекул, в основном азота). Но иди попробуй сочти все эти молекулы!
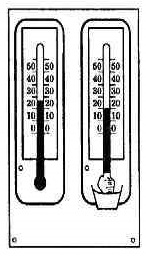
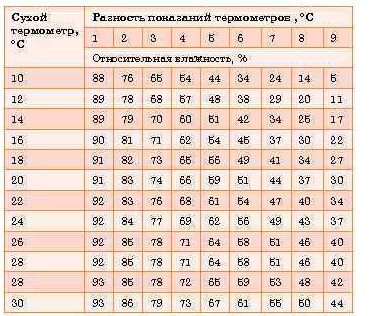
Поступим так – будем сравнивать температуры двух термометров (спиртовых, например), один из которых обёрнут в марлю, погруженную концом в блюдце с водой. С марли испаряется вода, охлаждая второй термометр.
По разнице температур, по тому сколько молекул испарилось – можно судить о влажности воздуха вокруг.
Чем больше разница температур – меньше влажность.
А бывает ли максимальная влажность – да, когда нет разницы температур, вода с марли уже не испаряется – в окружающем воздухе так много молекул воды, что он не вбирает их больше, напитался как губка.
В случае с нашим датчиком косвенно судить о количестве влаги можно, например если какой-нибудь материал изменяет свое сопротивление под действием влаги. Так, дерево и кожа человека уменьшают сопротивление электрическому току при увеличении влажности.
Почему относительная и зачем температура?
При разной температуре воздух способен впитать в себя разное воличество влаги. При температуре 0 градусов (по Цельсию) воздух максимально вбирает 5 г воды в один кубометр. То есть, если при этой температуре мы нашли в этом кубике молекул воды аж на 5 г – то влажность 100%. Если нашли только 2.5 г – то влажность 50%. Интересно, что при минус 10 воздух может вместить только 2.5 г воды. То есть, если при минус 10 нашли 2.5 г – то влажность 100% при данной температуре.
А можно ли найти больше, спрашивают ученики?. Что же будет, если охладить воздух? Молекулы воды, находящиеся в воздухе начнут летать с меньшими скоростями. Если раньше они вели себя как теннисные мячики, ударяя друг друга и терпели удары со стороны молекул самого воздуха, то теперь ударов всё меньше и они не такие сильные. А молекулы воды – как маленькие магнитики – начинают тяготеть, липнуть друг к другу, образуя туман и целые капли.
Воссоздать это атмосферное явление вы можете, вынув из холодильника банку варенья (если, конечно, вы любите варенье). Смотрите, она “запотела”. На банке выпала роса. Откуда взялась влага? Из воздуха, окружающего банку.
Посмотрите на воронку в ванне. Вода, уходя вниз, закручивается. То же и в атмосфере. Воздушный поток, устремленный вниз, сверху (из космоса) виден как воронка (по часовой стрелке), при этом давление у земли растет из-за притока воздуха (показания bmp280), облаков не образуется. Это ещё называют антициклон. Зимой при этом бывает похолодание из-за опускающегося сверху холодного воздуха. Снег же зимой идет при некотором потеплении. Как же так?
Нагретый у земли воздух поднимается потоком вверх, находящаяся в нём влага связывается в капли и даже замерзает. Образуются облака дождевые или снеговые. Поток при подъёме закручивает и сверху эта “перевернутая” воронка видна как вихрь (против часовой стрелки). Это циклон. Из-за оттока воздуха вверх давление у земли падает.
По этим изменениям давления можно предсказывать погоду на несколько дней вперед.
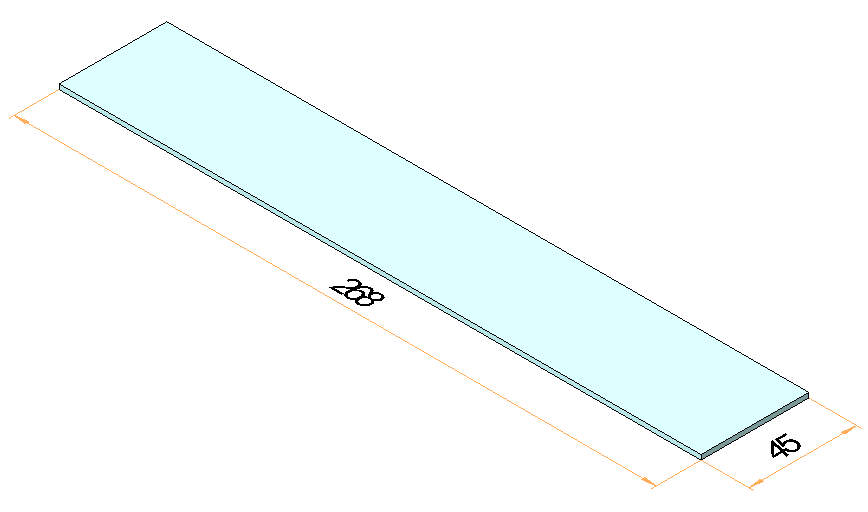
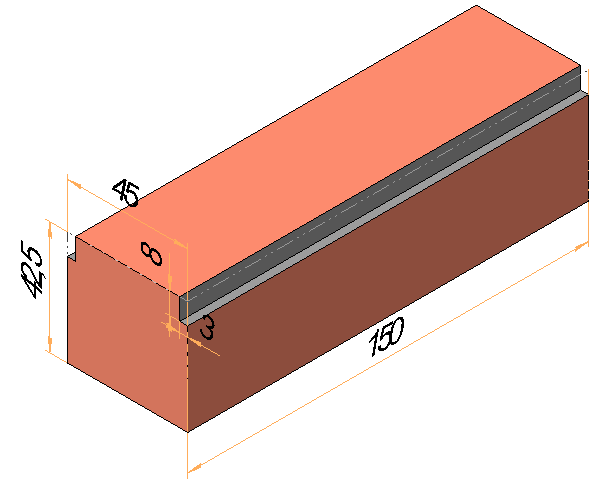
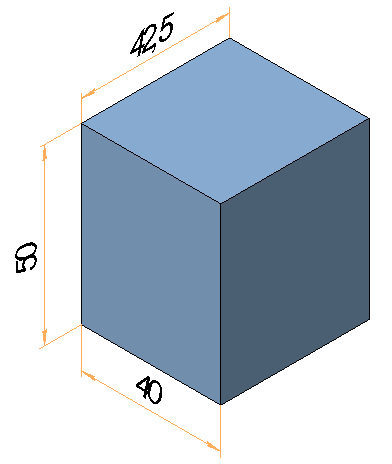
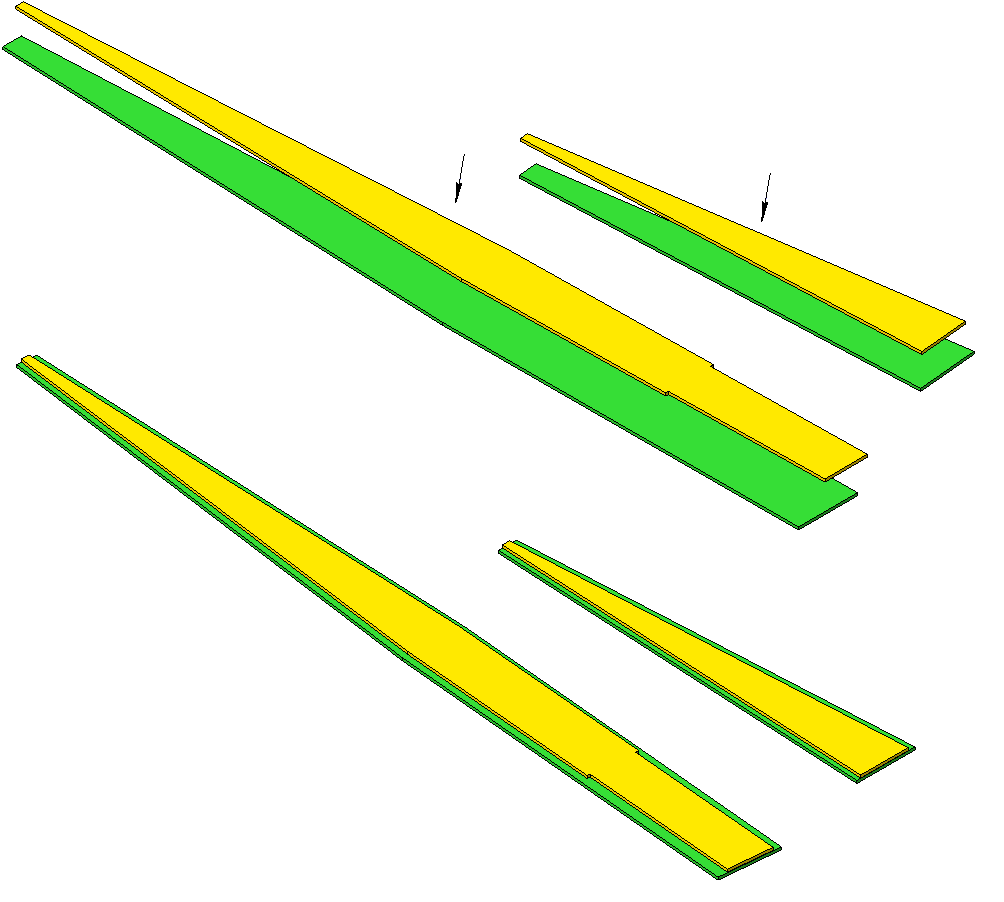
Обшивки самолета – полипропиленовая подложка под ламинат толщиной около 3 мм. Для крыла подойдет гибкая с продольными полосами. Линейки 50 см для лонжерона крыла и продольного усиления фюзеляжа. Фанерка для моторамы и резинка портновская (не менее 1 см шириной) для крепления съёмного крыла. Плита утеплителя ППЭ для элементов усиления фюзеляжа.
С клеем для ПП плитки есть хитрость - ему надо дать подсохнуть перед окончательным приклеиванием.
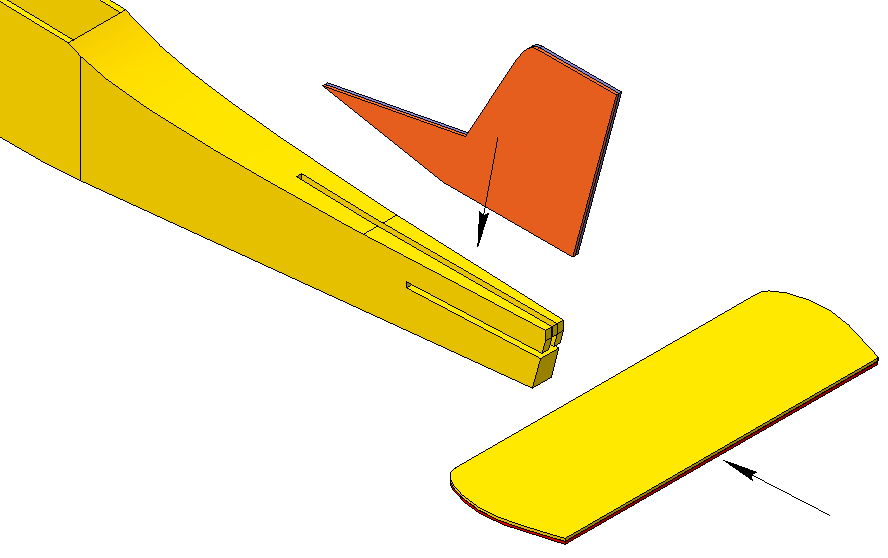
Хвостовое оперение
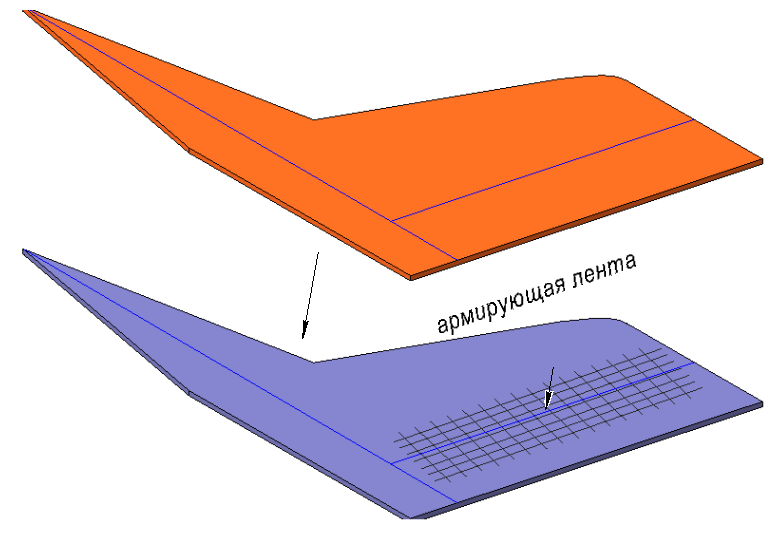
Сборка хвостового оперения - киль и стабилизатор
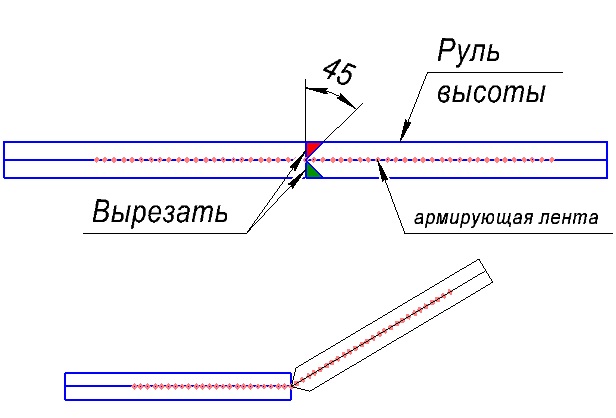
1. Вырезать по шаблону единой деталью верх и низ, сложить, проклеив лентой "серпянкой" место сгиба руля высоты. Проклеить предварительно место сгиба верх-низ скотчем
2. Сложить две части киля, проклеив место сгиба руля направления лентой "серпянкой"
3. Вырезать по месту сгиба руля высоты и направления
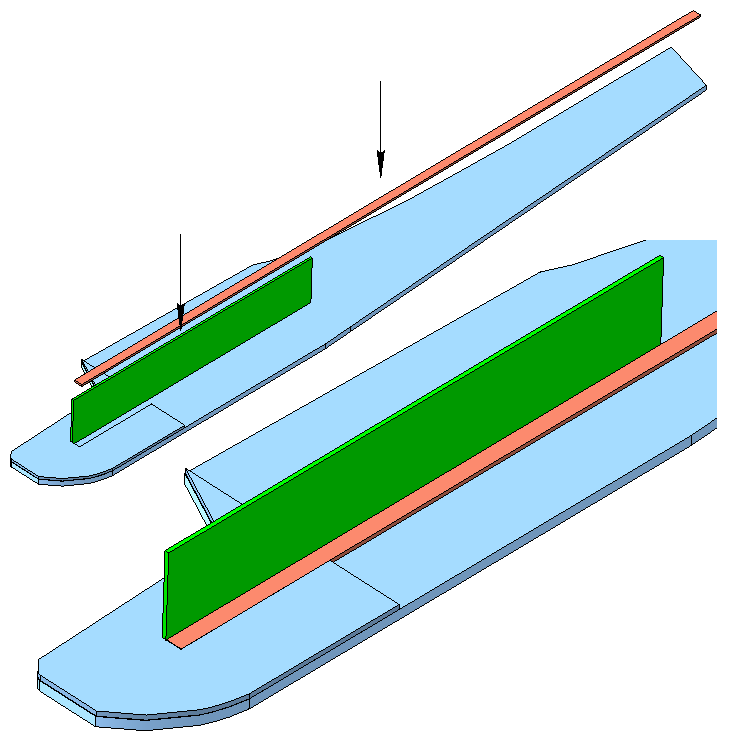
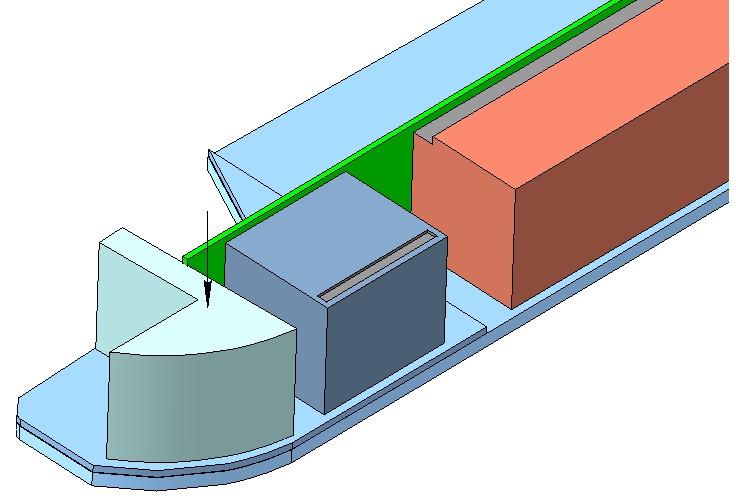
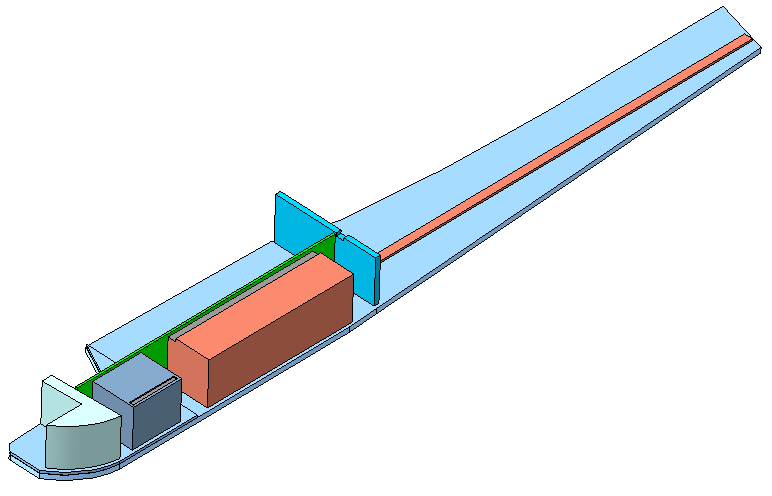
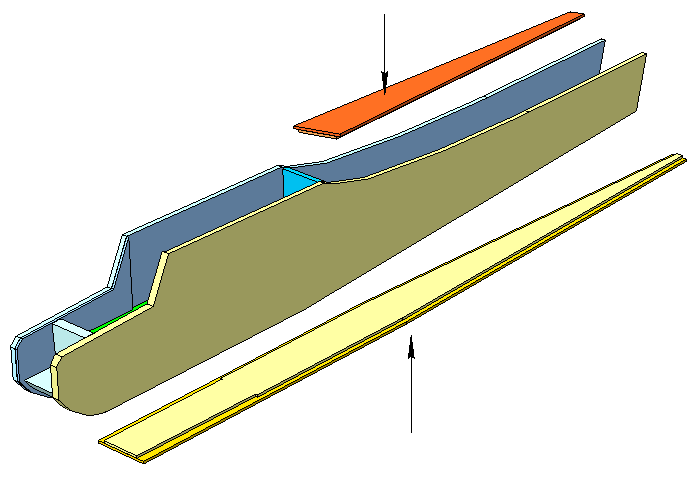
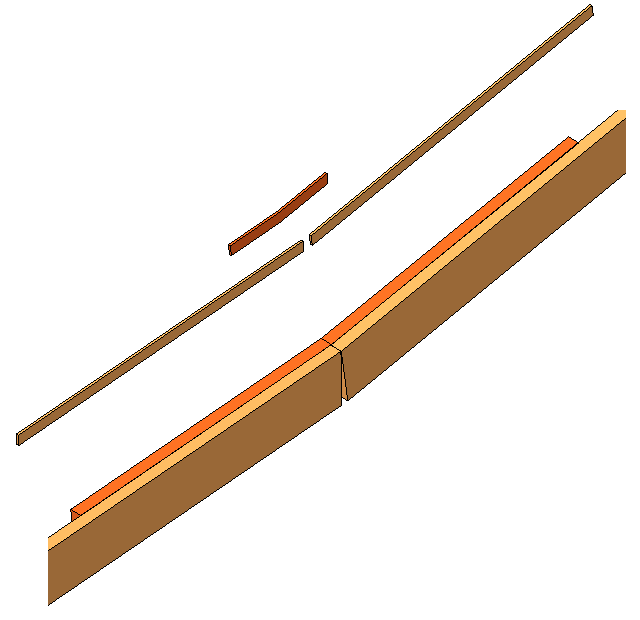
Сборка фюзеляжа
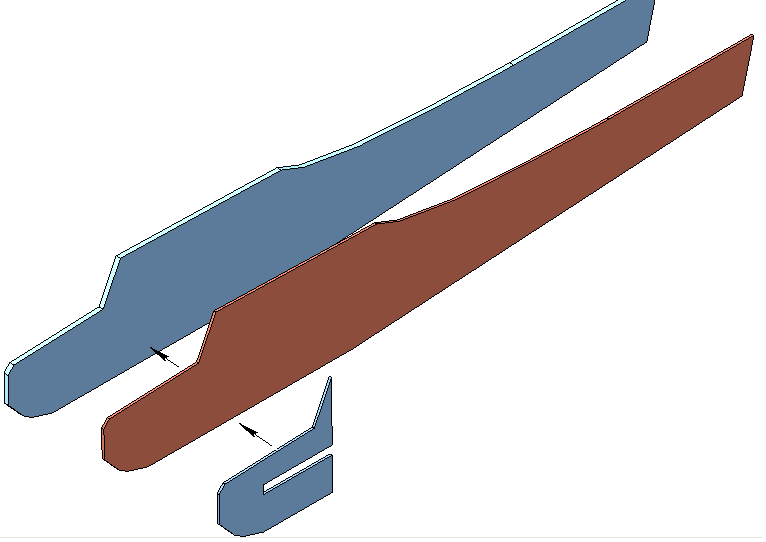
Фюзеляж - Борт
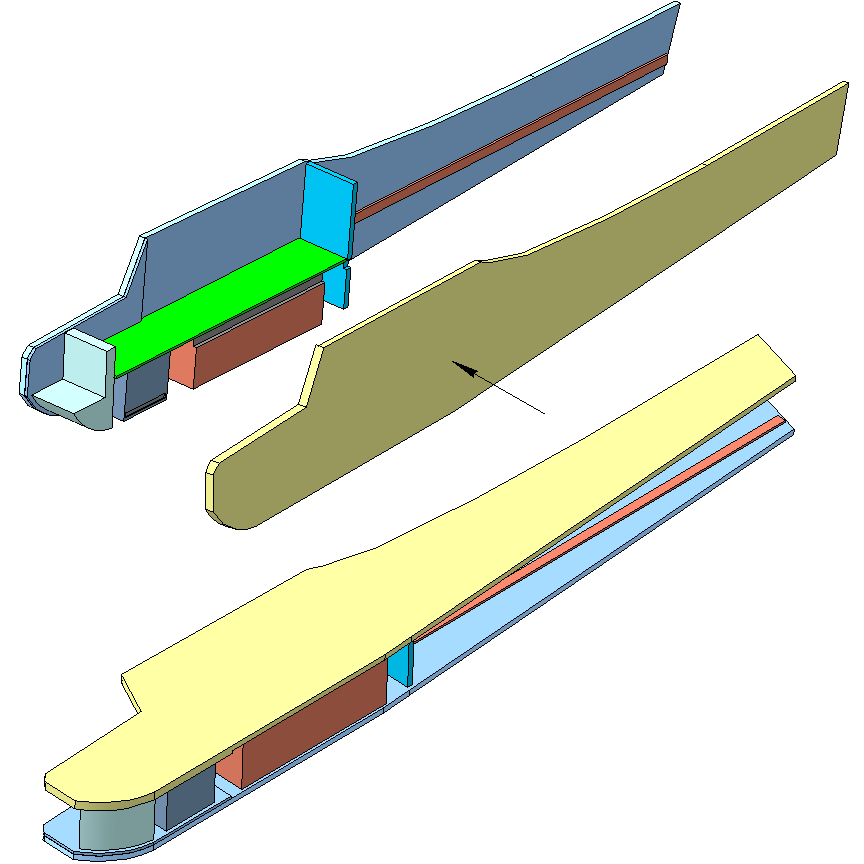
1. Склеить обшивку (борт) из двух слоёв и носовой накладки
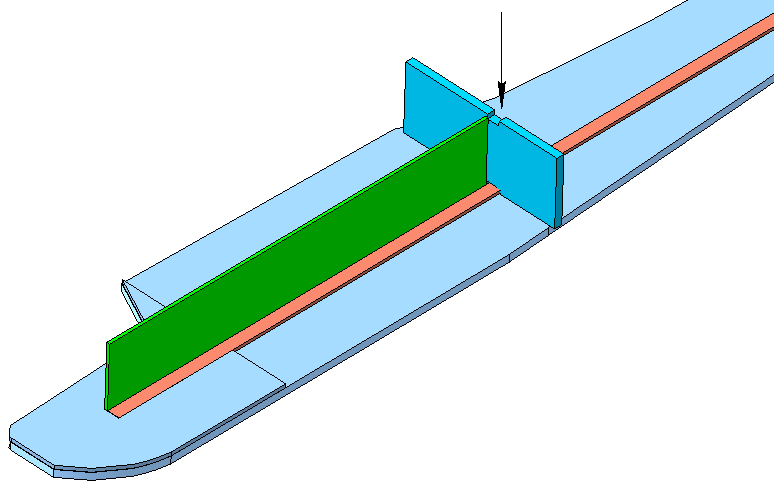
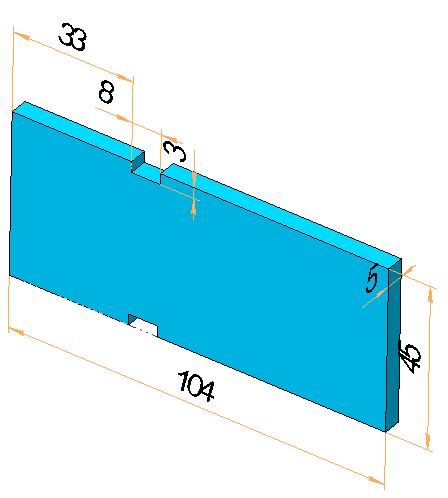
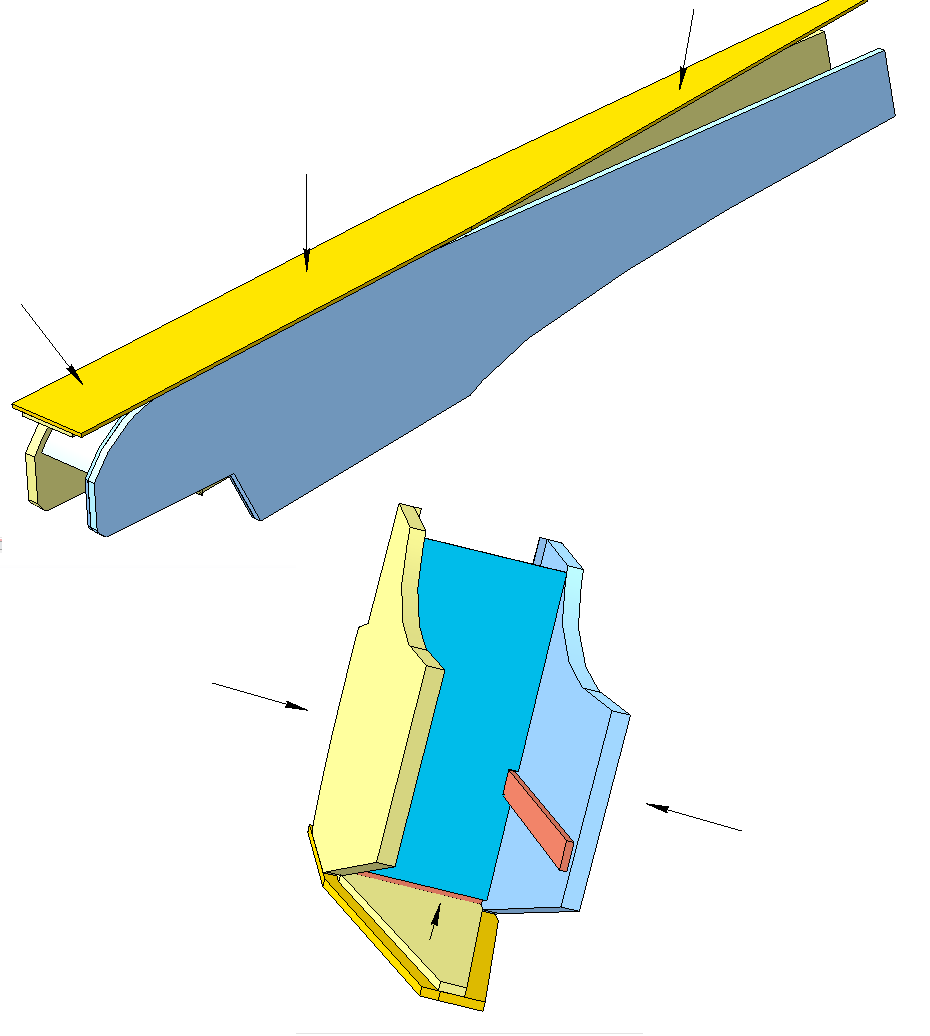
Фюзеляж - Установка усилений
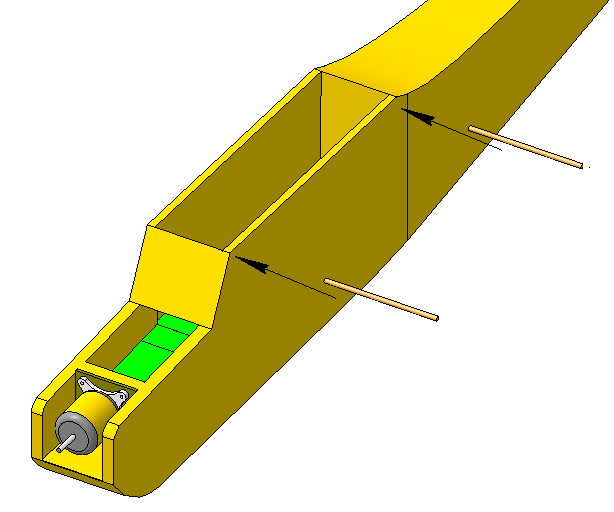
1. Приклеить продольное усиление (склеить из линейки - ширина 6...8 мм). Установить пол
2. Установить заднее усиление кабины
3. Установить заднее усиление пола
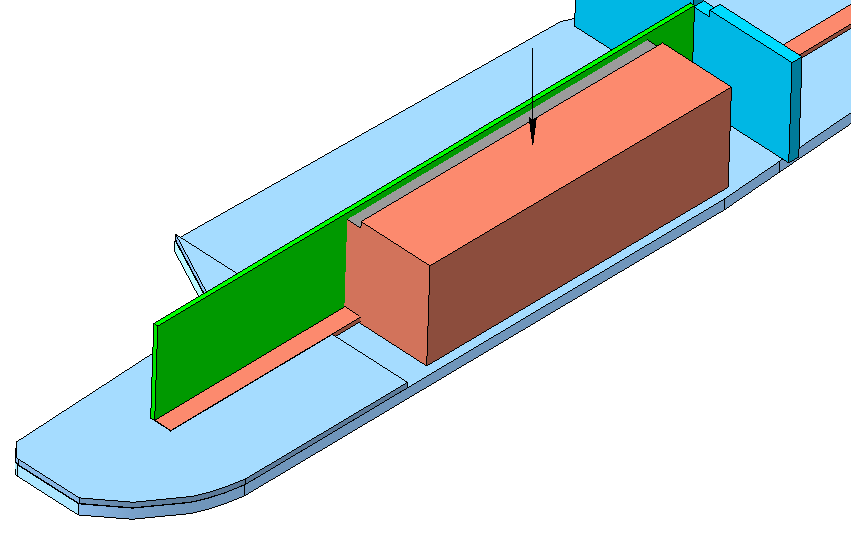
4. Установить переднее усиление пола
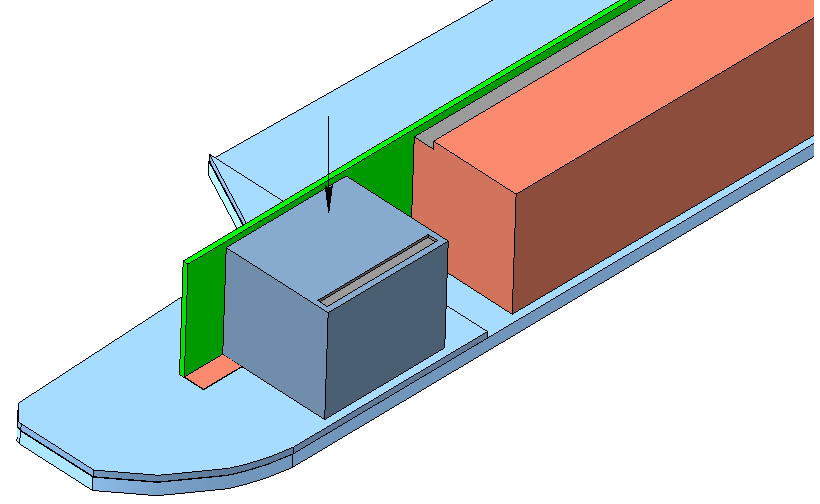
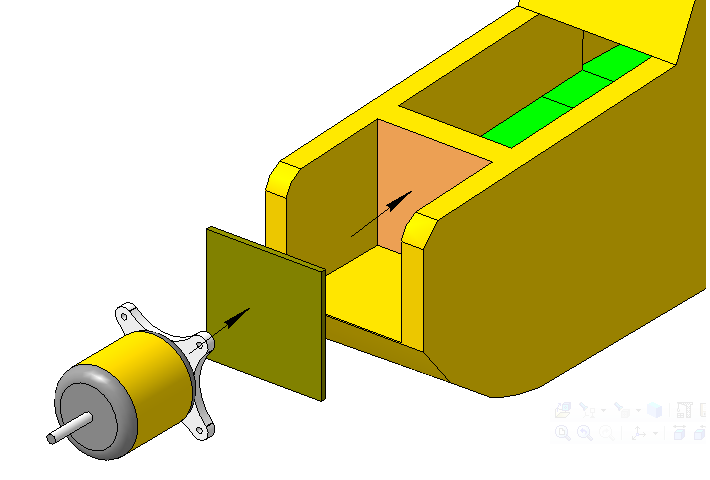
5. Установить усиление под мотораму с учетом выкоса двигателя
7. Ждать высыхания клея
Дополнительные элемента усиления фюзеляжа
1. Пол
2. Заднее усиление кабины
3. Заднее усиление пола
4. переднее усиление пола
5. Усиление под мотораму
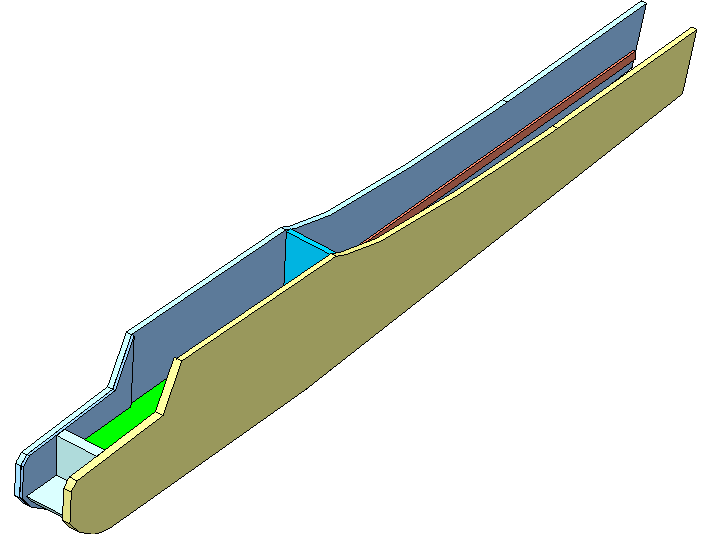
Сборка фюзеляжа
1. Приклеить борт, выверить отсутствие перекосов
2. Ждать высыхания клея
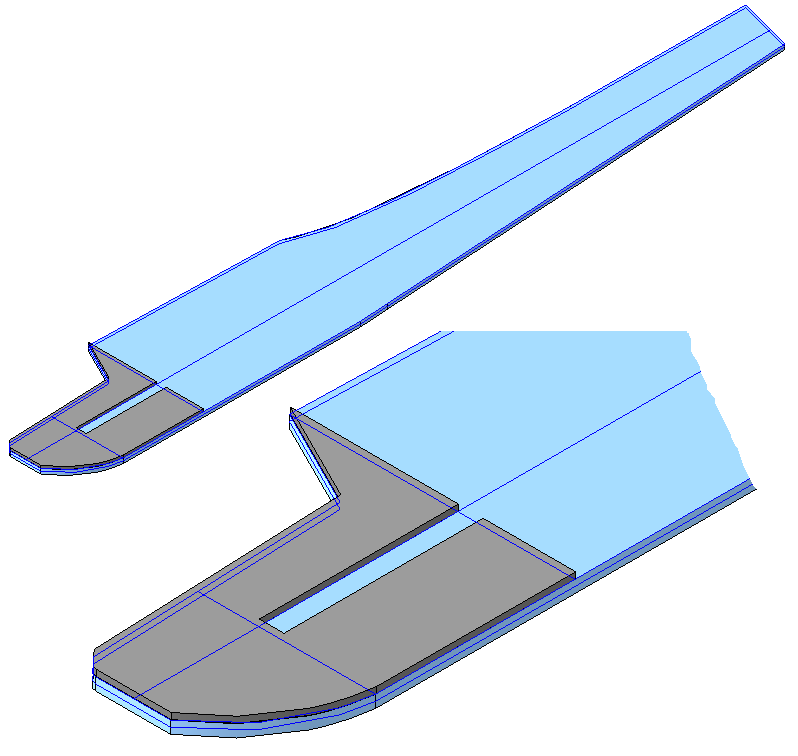
Фюзеляж - установка верхней и нижней обшивок
1. Склеить из 2-х частей верхнюю и нижнюю обшивки фюзеляжа
2. Установить и приклеить обшивки фюзеляжа
3. Прижать малярным скотчем и дать клею высохнуть
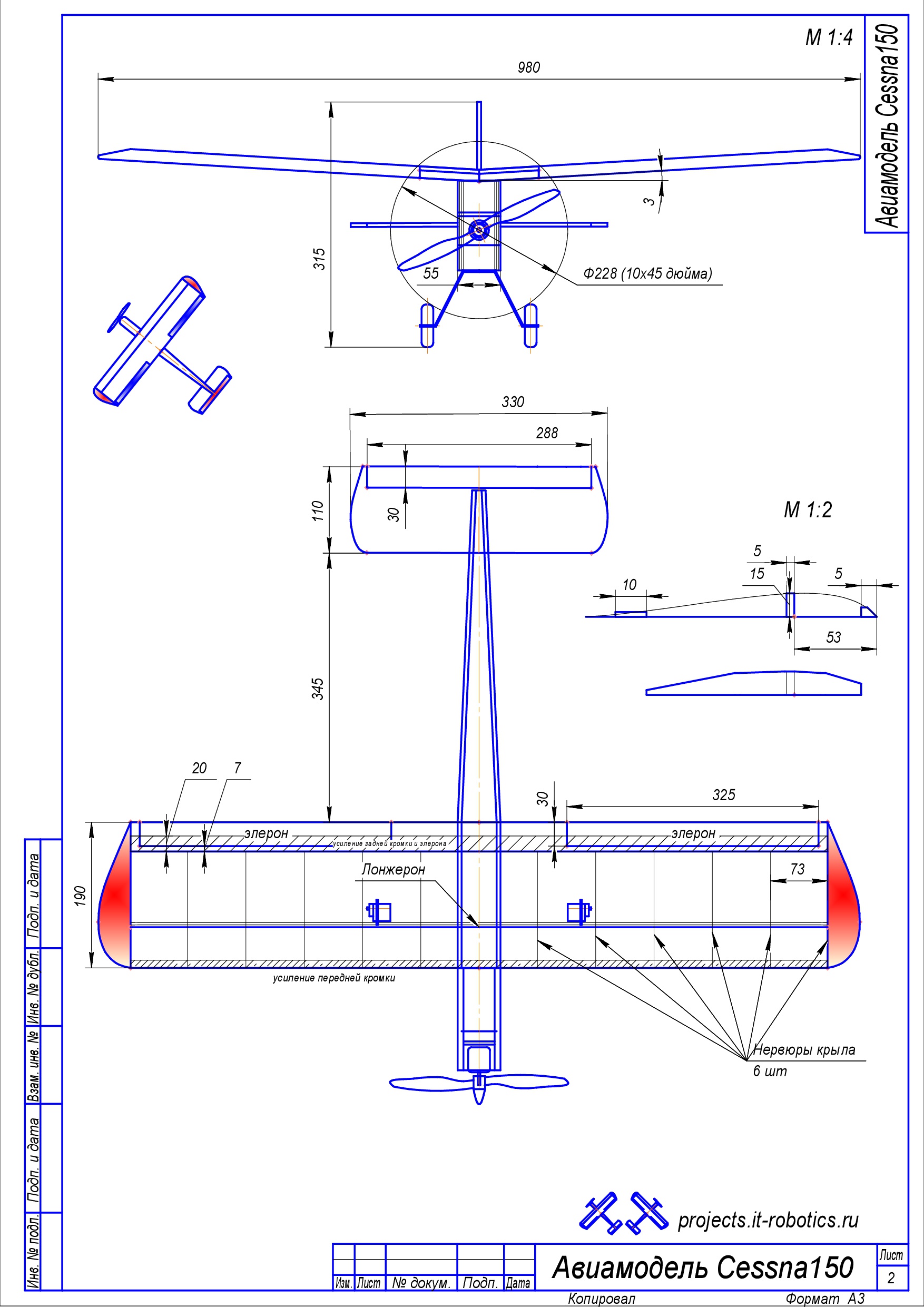
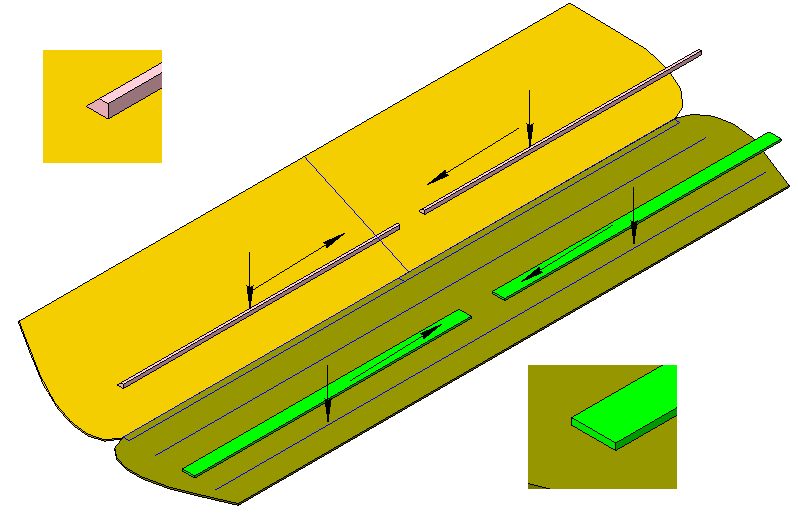
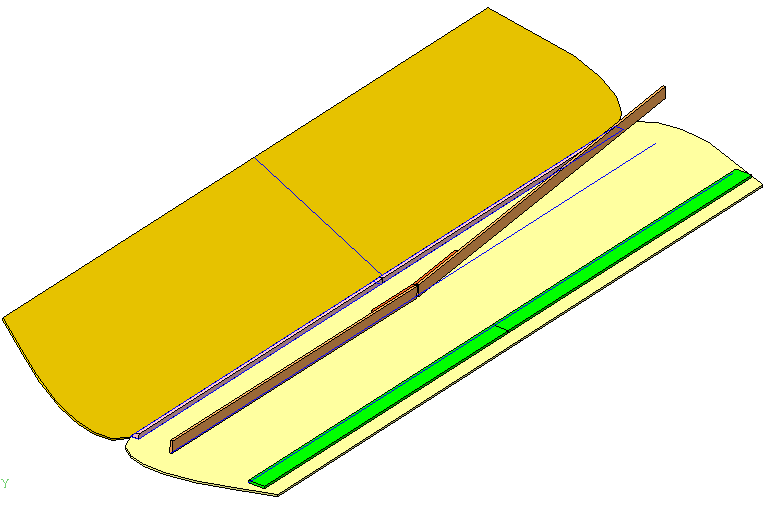
Крыло
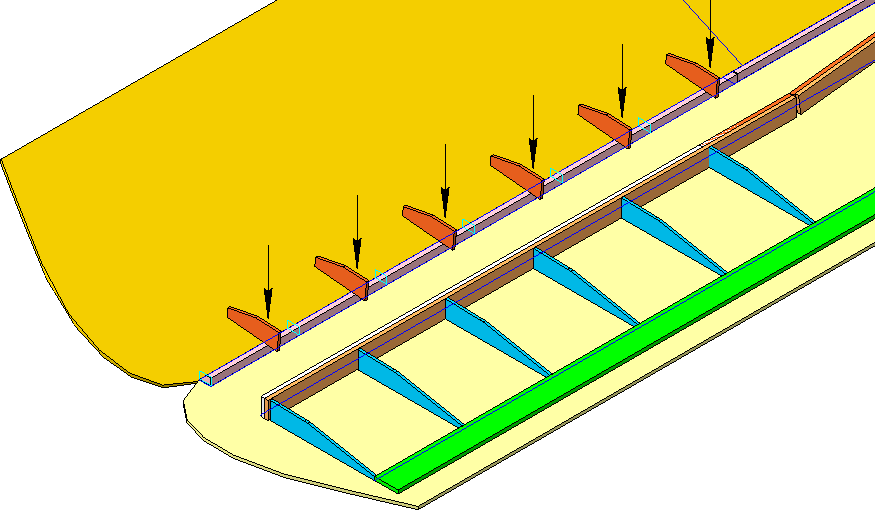
Установка лонжерона и нервюр
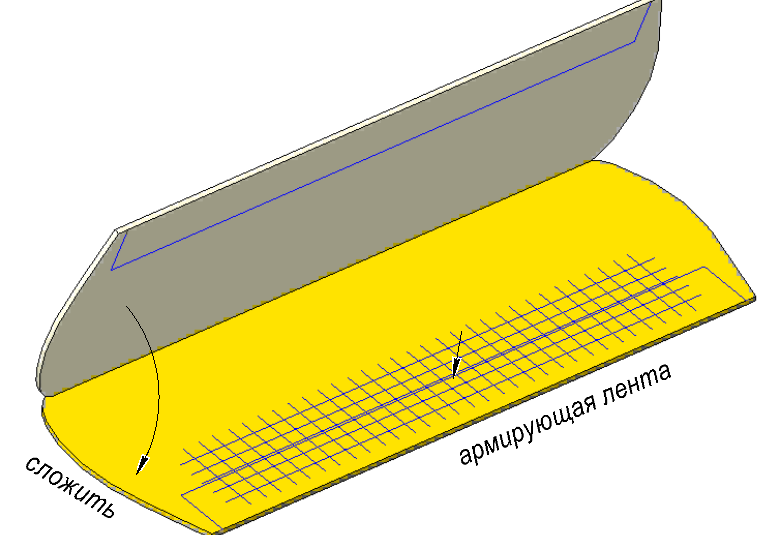
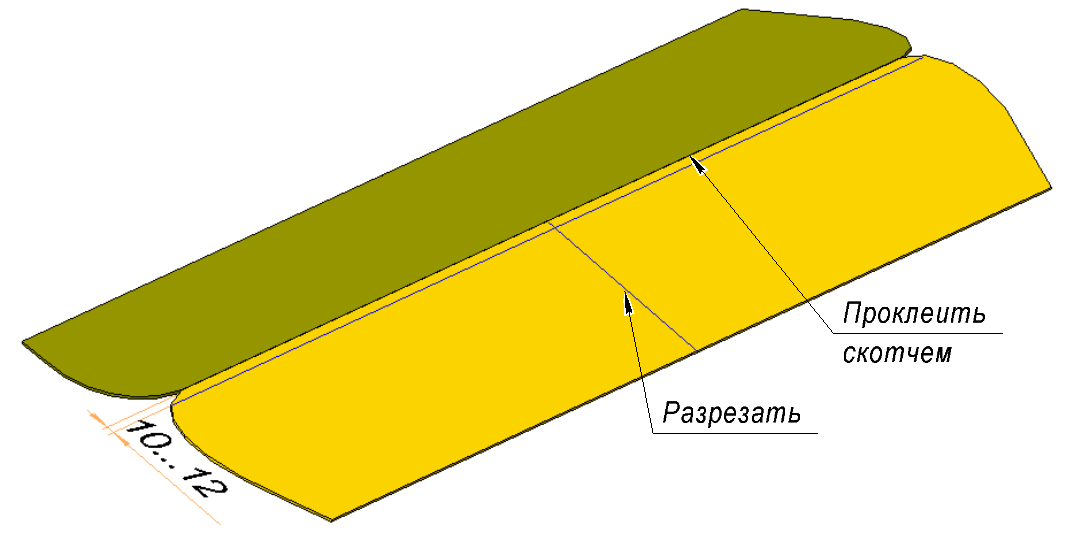
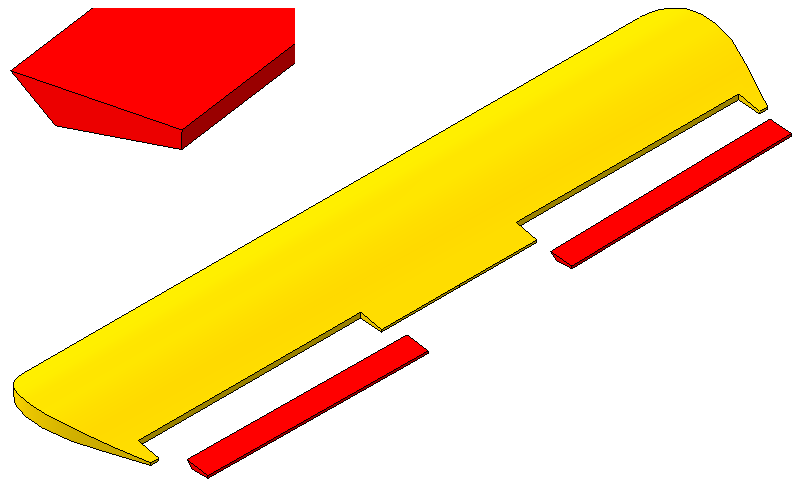
1. Вырезать по шаблону единой деталью верх и низ крыла (низ с отступом на 10 мм для сгиба). Усилить место сгиба крыла скотчем и армирующей лентой. разрезать верхнюю обшивку крыла
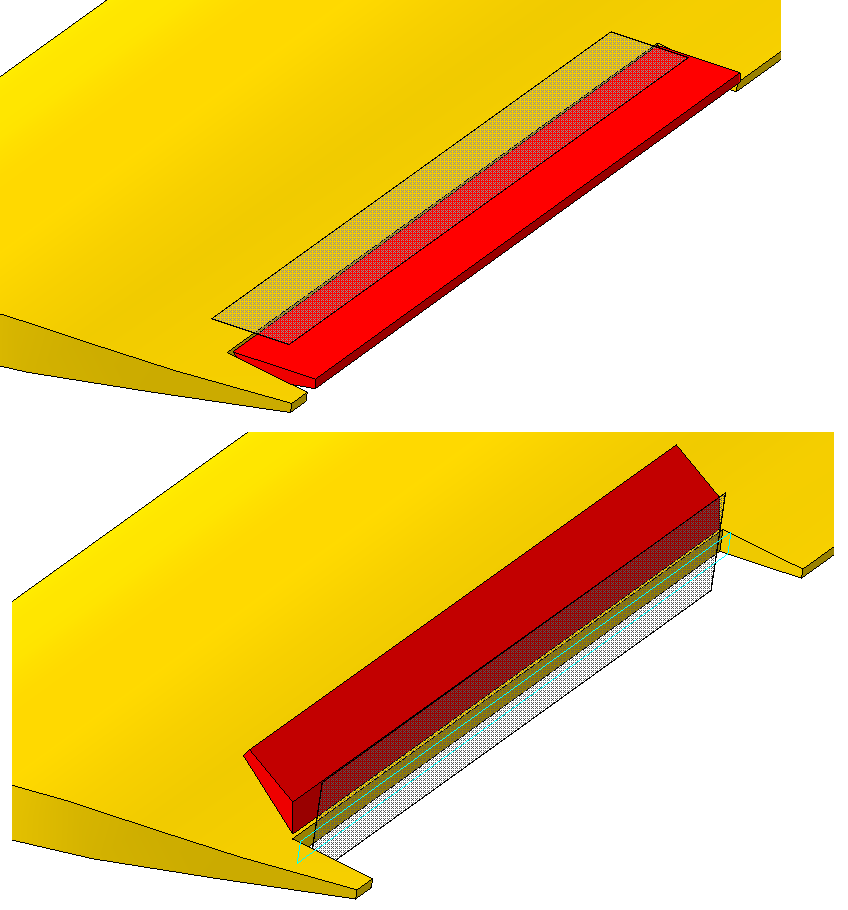
2. Установить усиления передней кромки крыла и элеронов
3. Склеить лонжерон крыла (ПВА)
4. Приклеить лонжерон на одну сторону крыла
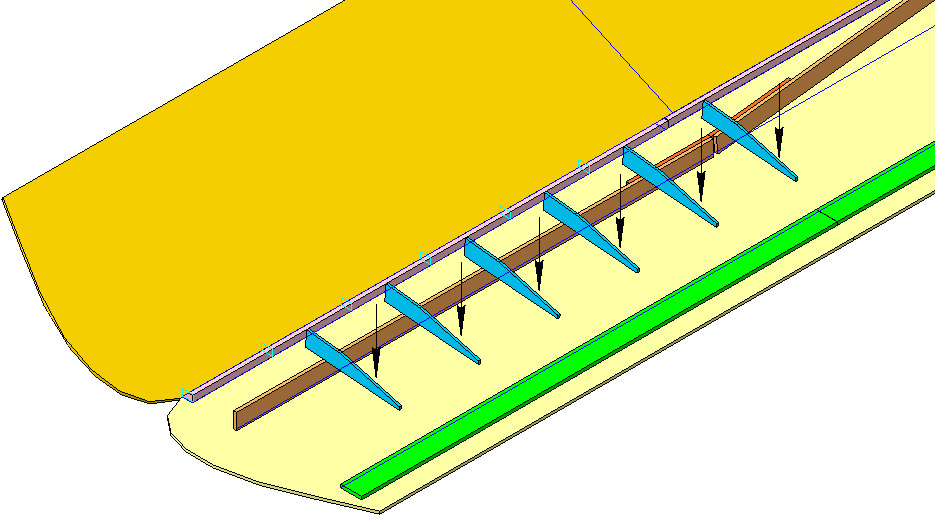
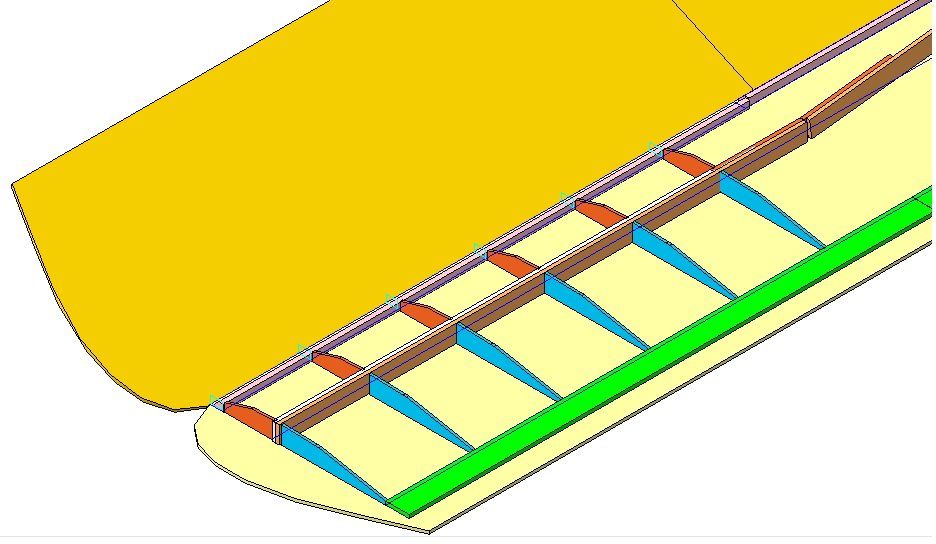
5. Установить элементы нервюр
6. Установить элемента нервюр
7. Дать клею высохнуть
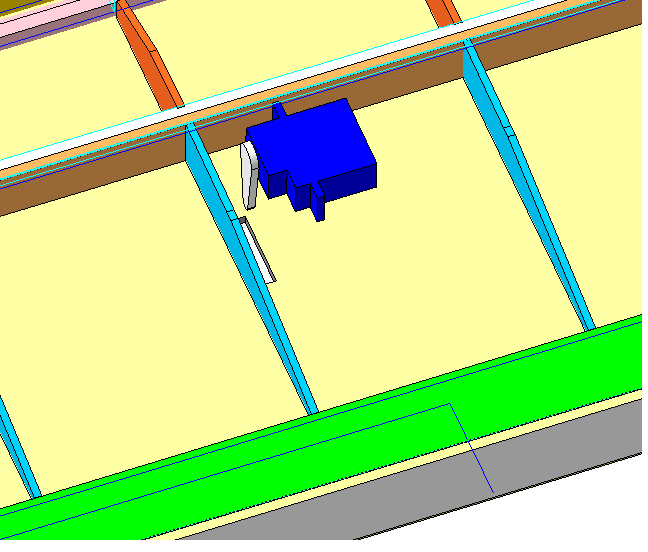
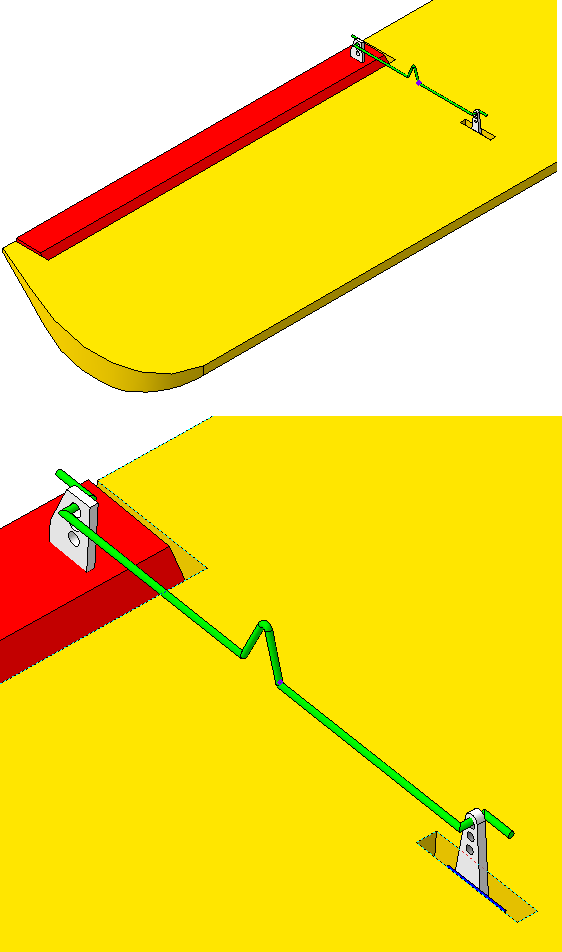
Установка серв и склейка обшивки
1. Шкуркой убрать материал с задней части крыла по плоскости
2. Установить сервы
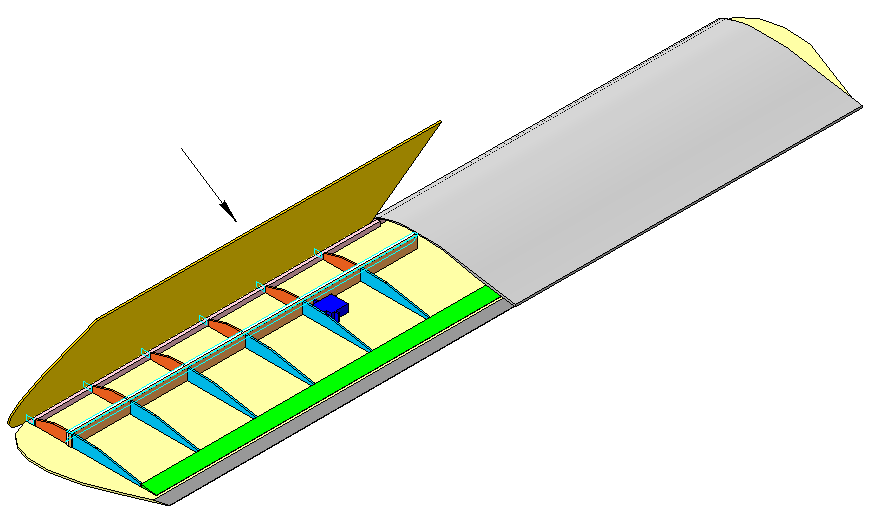
3. Закрыть верхнюю обшивку крыла. Дать высохнуть клею. Повторить все операции с другой частью крыла
Навеска элеронов
1. Вырезать элероны
2. Навесить элероны на скотч
3. Сделать тягу из канцелярской скрепки
Установка оперения и моторамы
1. Установить киль и стабилизатор на термоклей
2. Установить мотораму в сборе с двигателем на эпоксидный клей
3. Установить элементы для крепления крыла резинками (бамбуковая палочка)
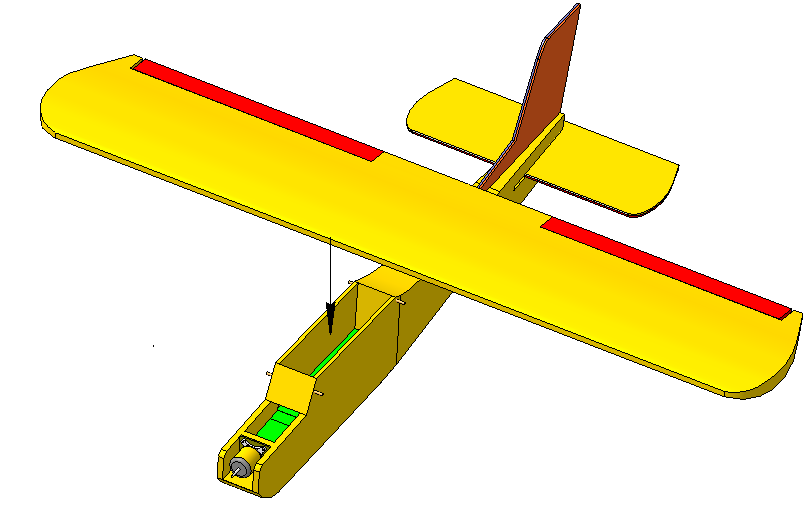
4. Можно устанавливать крыло на резинки
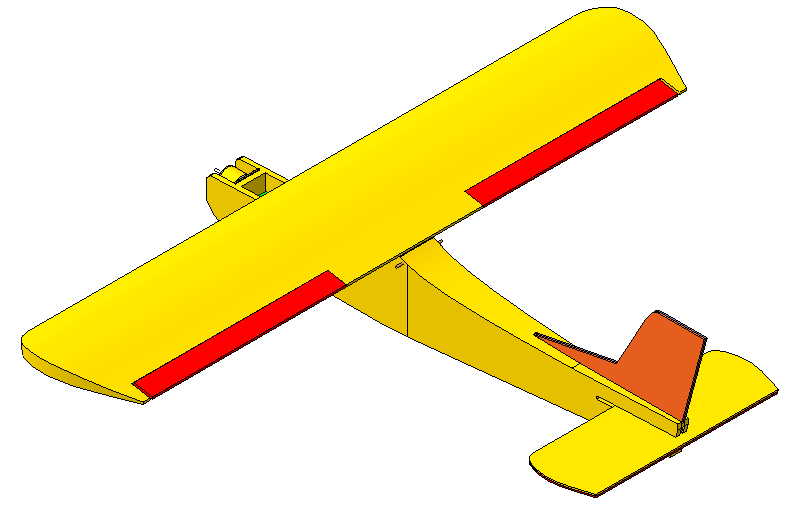
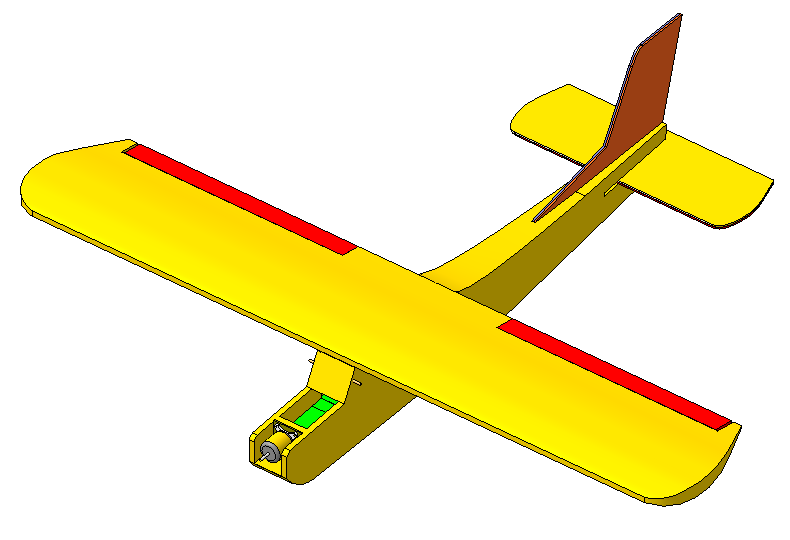
Конструкция планера в сборе
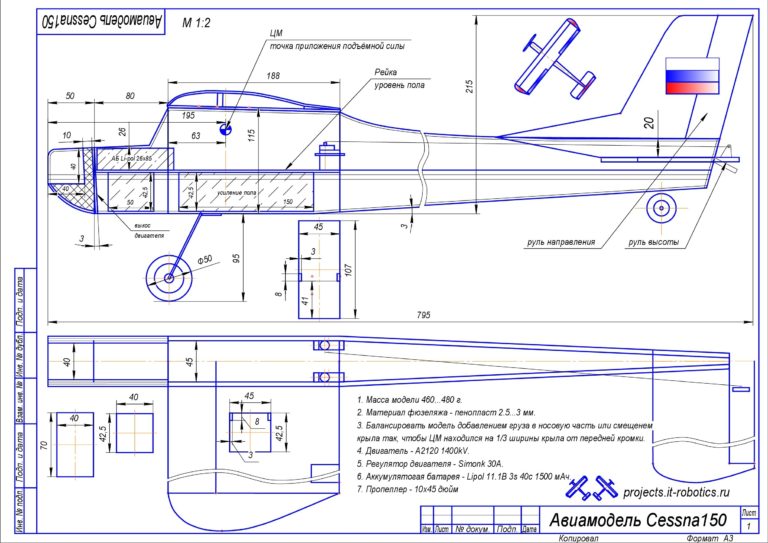
Балансировка
Собрав фюзеляж, оснастив его всем оборудованием, установив крыло – необходимо провести балансировку самолёта.
Центр масс полностью собранного и укомплектованного самолёта должен приходиться на линию, отстоящую от передней кромки крыла на 1/3 ширины крыла. Линию прочертить заранее. Поставить большие пальцы на линию, поднять – самолёт должен уверенно лежать и никуда не крениться.
Изучаем как цифровая камера работает – ПЗС матрица… Для программиста это просто двумерный массив с данными пикселей, который надо как-то с камеры забрать, пользуясь строчной и кадровой синхронизацией.
Нужно посмотреть кодировки цвета пикселя RGB, YUV (мы возьмём именно YUV, где на один пиксель приходится 2 байта).
Ну и надо понимать, что такой сложный прибор, в котором есть автоматические функции управления временем экспозиции, балансом белого, гаммой, резкостью и много чего ещё потому и сложный изнутри, чтобы быть простым для внешнего управления. Камера внутри себя содержит DSP (ЦОС) процессор. Для программиста задача сводится к начальной конфигурации камеры – установке определенных битов нужных регистров, а затем просто собираем байты пикселей изображения.
Камера способна выдать VGA картинку 640х480 со скоростью до 30 кадров/с, но для ардуины лучше-меньше, 320х240 еще ничего.
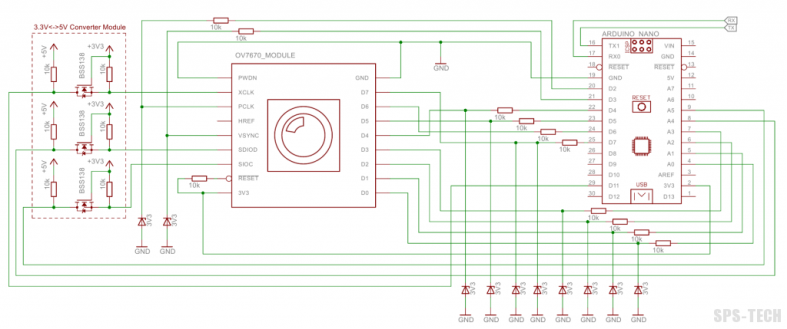
Внимание!Камера на 3 В – поэтому необходимо использовать преобразователи уровня для связи с 5 В Arduino Uno.
Если делаете плохо, т.е. как на картинке ниже – позаботьтесь о состоянии портов перед началом, чтобы точно ничего на выход не вылилось (и не было пинов, сконфигурированных на выход и подтягивающих резисторов), а то сгорит это чудо полупроводниковой техники.
Лучше подключать вот так (скопировал с одного блога, который пропал куда-то, ну не пропадать же хорошей картинке)
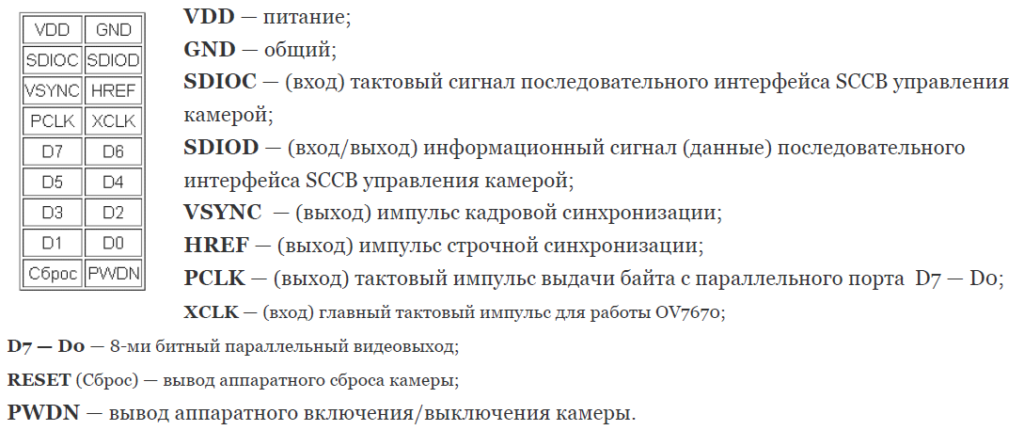
Разъём камеры
Сигнал такта на входе и выходе камеры
Итак, чтобы оживить любое электронное устройство нужен тактирующий импульс или Clock. На ардуине на 11 пине выдадем 8 МГц ШИМ на пин камеры XCLK.
Теперь можно убедиться в работоспособности камеры – на выходе PCLK – те же 8 МГц. Ардуино не сможет обрабатывать байтовые посылки с такой скоростью, поэтому воспользуемся внутренним (для камеры) делителем частоты – максимальное значение 31 – оно хранится в регистре с именем CLKRC.
Расчет внутренней частоты (умножать не будем PLL_Multiplier=1):
Fint = 8 000 000 / (2*31+1) = 125 000 Гц – с такой частотой будут выдаваться байты кадра в ардуину.
Кадр 320х240 = 76800 пикселей. Для RGB и YUV пиксель кодируется двумя байтами. Байт же передаётся за один такт параллельно по D0-D7.
125 000 / (76800 * 2) = 0.8 кадров/сек.
Настройка камеры
Далее необходимо сконфигурировать регистры камеры – установить формат изображения 320х240, задать цветовую кодировку, установить делитель частоты и пр. Для этого используется интерфейс SCCB – аналог I2C (в даташите МК AVR он ещё называется TWI).
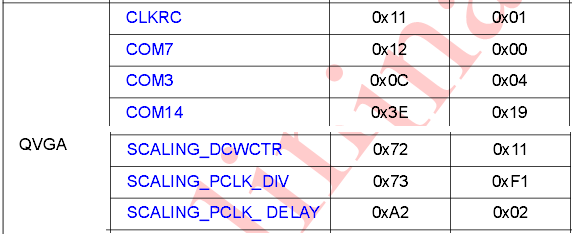
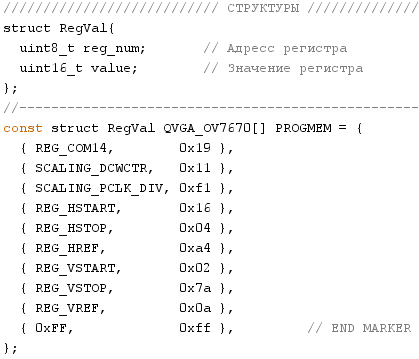
Собственно, производитель привел регистры (адрес-значение), которые надо изменить для перехода в режим QVGA (320×240)
Ёще разберемся в них отдельно, а CLKRC тут для 30 кадров/с.
Обработка видео потока
Осталось только забрать видео поток.
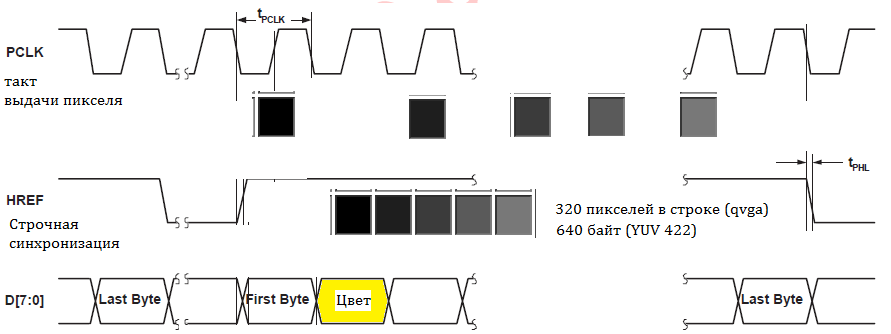
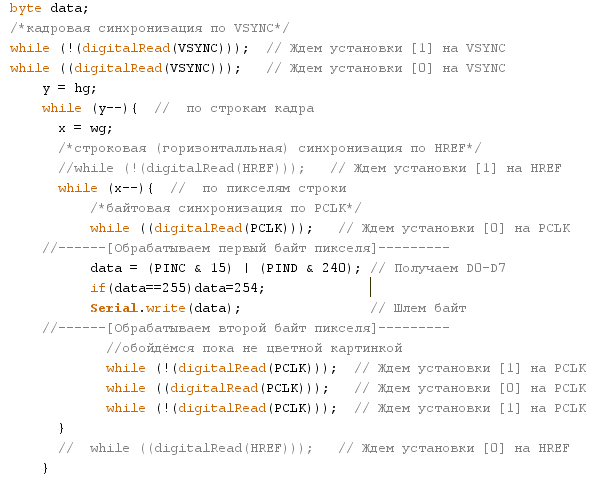
Начинается новый кадр – ждём переключения VSYNC с 1 на 0.
Строчную синхронизацию можно брать по HREF, а можно просто по счетчику длины строки.
По байтовому такту PCLK (переход в 0 – начало нового байта) забираем байт с параллельного порта D0-D7 (наверное, совсем правильно будет забирать байт в момент перехода PCLK из 0 в 1). Для YUV первый байт содержит информацию о пикселе в градациях серого, второй – о цвете. Для простоты пока второй байт не берем и просто ждем PCLK 1-0-1.
Самая захватывающая (дух и само изображение) часть программы выглядит так:
Большое отступление. Загадочные регистры
Регистры процессора (микроконтроллера) — блок ячеек памяти, образующий сверхбыструю оперативную память внутри процессора. Есть регистры, используемые самим процессором для вычислений, например, при выборке из памяти очередной команды она помещается в регистр команд, а при выборке переменных они помещаются в регистры операндов.
Но в микроконтроллере есть ещё и другие регистры – хранящие настройки разных периферийных устройств. С ними в основном и имеет дело программист. Например регистр PORTB, хранящий состояние выводов (пинов), или регистр DDR, хранящий настройки, находятся ли выводы (пины) в состояние входа или выхода.
В случае с камерой, регистр – это служебная очень быстрая память, например ячейки по 8, 16 бит, к которой можно обратиться по адресу. На стороне камеры работает программа, которая управляет камерой в соответствии с настройками, хранящимися в этих регистрах. Эта программа, в том числе, принимает посылки по I2C – первые 8 бит – адрес, следующие 16 бит – значение регистра. Вот и все. Такой вот протокол обмена.
Конфигурировать регистры будем булевыми операциями – AND (&) и OR(|).
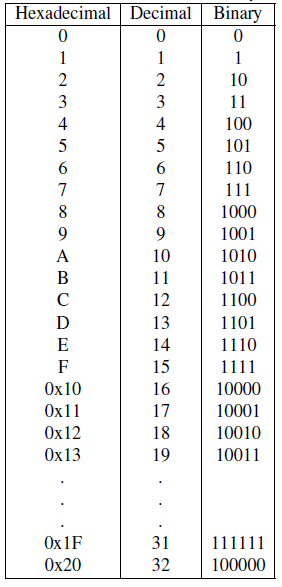
Ну, говорить о том, что представлять содержание регистра удобнее всего в шестнадцатеричной или двоичной системе не будем
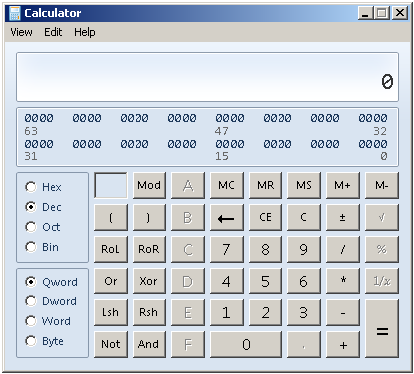
Также умолчим о возможности калькулятора (вид->инженерный) переводить числа между разными системами
Вот таблица истинности – правила двоичной арифметики, ну это уж почти всем известно.
Вот тут незадачливые программисты найдут наконец применение булевой логике, так ненавистной им в школе
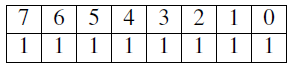
Ну раз регистр это просто ячейка, например, из 8 бит, то выставим в регистре с именем PORTB восемь единичек:
PORTB = 0b11111111; (или PORTB = 0xFF;)
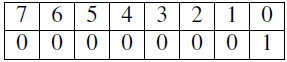
Или все нули:
PORTB = 0b00000000; (или
PORTB = 0x00;)
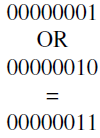
А теперь, как выставить 1 в первом бите, не изменив состояние других – при помощи OR (операция выполняется побитово):
PORTB = 0b00000001; (исходное состояние)
PORTB |= 0b00000010; (выставляем 1 в первом бите и теперь PORTB содержит 0b00000011)
PORTB |= 0x02; (тоже самое)
Можно убедиться, что 0 не изменяет состояния исходного бита, а 1 делает любой исходный бит 1 – см. таблицу истинности OR(|).
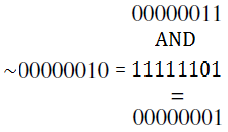
Как же выставить 0 в любом бите – при помощи AND
Выставляем 0 в первом бите, не изменив состояние других – при помощи AND (операция выполняется побитово):
Операция ~ изменяет все биты на противоположные
PORTB = 0b00000011; (исходное состояние)
PORTB &= ~0b00000010; (выставляем 0 в первом бите и теперь PORTB содержит 0b00000001)
PORTB &= ~0x02; (тоже самое)
Можно убедиться, что 1 не изменяет состояния исходного бита, а 0 делает любой исходный бит 0 – см. таблицу истинности AND(&).
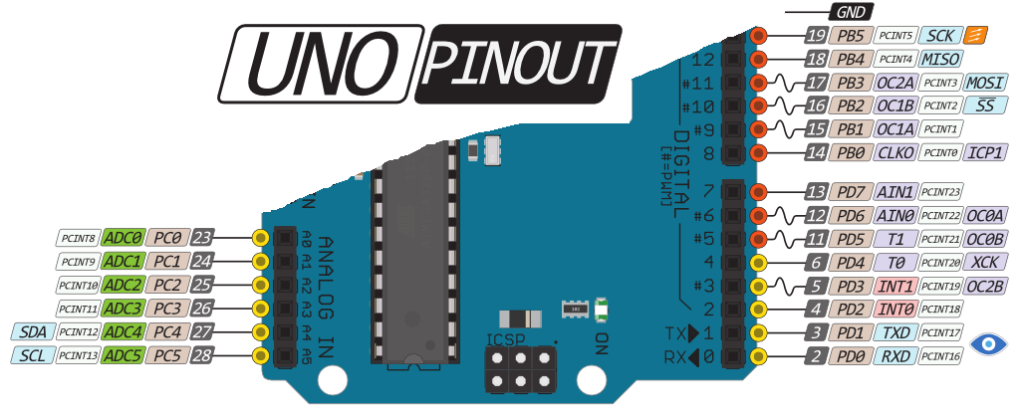
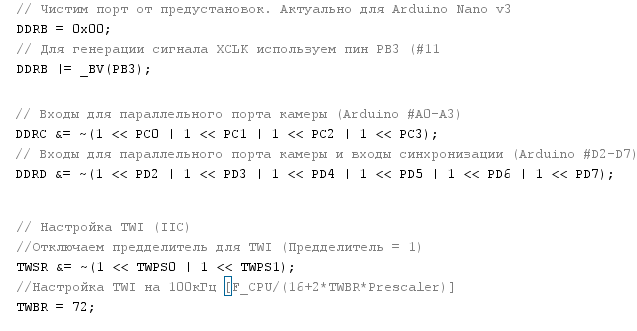
Заглянув в datasheet на микроконтроллер ATmega8 семейства AVR (да, да, именно такой и в вашей ардуине), в ужасе ничего не понимаешь понимаешь, что выходы соответствуют трем портам B, C, D – PB0-5, PC0-5, PD0-7. В Arduino эти названия переименованы в цифровые выводы D0-D13 и аналоговые входы A0-A5.
Выводы управляются регистрами PORTх и DDRх.
Например, вывод PB5 управляется пятым битом в регистрах PORTB (состояние вывода – 0 или 1, 0В или 5В) и DDRB (настройка вывода – на вход(0) и выход(1));
Итак, чтобы подать 1 (5В) на 13 пин ардуино (PB5):
Надо настроить пин на работу в режиме выхода
DDRB | = 0b0010000; (тоже самое, что pinMode(13,OUTPUT))
Выставить 1 в 5 бите регистра PORTB
PORTB |=0b0010000; (тоже самое PORTB |=1<<5;)
Вот настройки портов ардуино (тут не всё, но многое)
Подробнее о настройке камеры
Всего настроечных регистров более 100, но для них есть стандартные значения. В принципе, менять нужно только то, что требуется для перехода в требуемый режим.
Все адреса и рекомендуемые значения регистров – уже подготовлены и хранятся в .h файлике в виде #define RegName RegAddress.
Перед началом работы производитель рекомендует все регистры сбросить в состояние «default values» выставив 7-й бит в регистре СОМ7 в 1 (СОМ7[7] = 0x80) используя функцию wrReg(reg_addr, reg_val).
Сброс регистровwrReg(REG_COM7, 0x80);
Уменьшение частоты выдачи байта в Arduino до 125кГцwrReg(REG_CLKRC, 31);
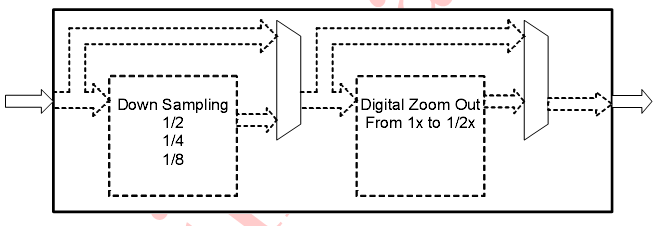
Механизм изменения размера картинки (разрешения) выглядит так:
Чтобы получить, например, 256х128 размера картинку, надо сначала передискретизировать (down sampling)VGA – взять каждый второй пиксель и получить 320х240, а затем использовать масштабирование (zoom) с коэффициентами 0.8 по горизонтали и 0,53 по вертикали сделает 256х128.
Чтобы изменить разрешение на 320х240 нужен только down sampling
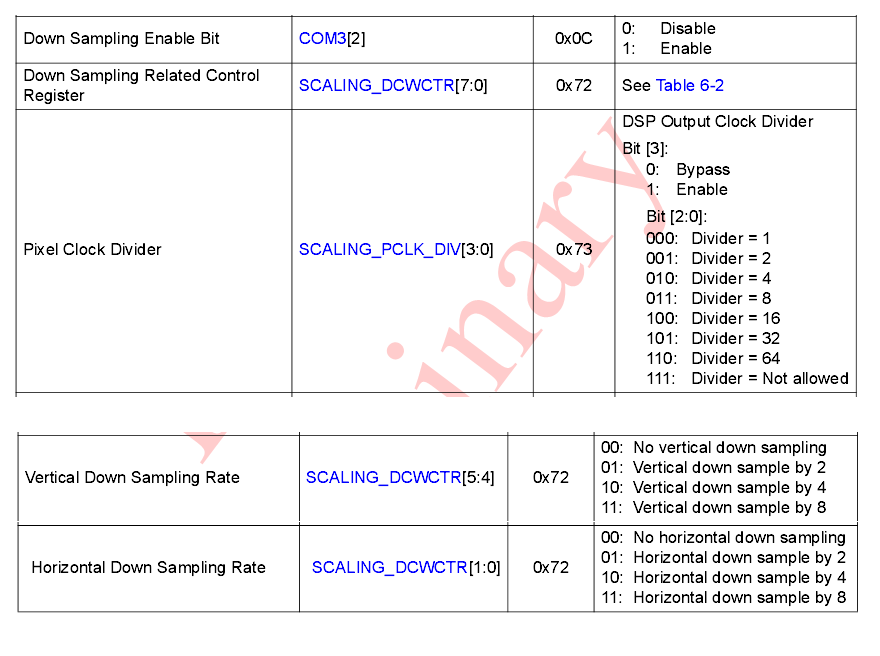
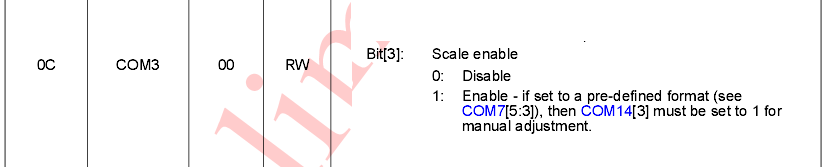
Для этого надо разрешить масштабирование (в нашем случае только down sampling), выставив в 1 второй бит регистра СОМ3
Разрешить масштабированиеwrReg(REG_COM3, 4);
Устанавливаем коэффициент 2 передискретизации по вертикали и горизонтали – 1 в битах [4] и [0] регистра SCALING_DCWCTR
Передискретизация - берем каждый 2-й пиксель и строкуSCALING_DCWCTR, 0x11
Устанавливаем делитель такта PCLK на 2 на выходе из DSP в регистре SCALING_PCLK_DIV (1 в нулевой бит) – видимо, из-за пониженной скорости выдачи пикселей с матрицы (берем каждый второй) и частота работы DSP должна быть понижена
Немного о том, что знают настоящие не “ардуино-зависимые” программисты о микроконтроллерах
И еще о том, зачем в школе мучают булевой алгеброй
Регистры процессора (микроконтроллера) — блок ячеек памяти, образующий сверхбыструю оперативную память внутри процессора. Есть регистры, используемые самим процессором для вычислений, например, при выборке из памяти очередной команды она помещается в регистр команд, а при выборке переменных они помещаются в регистры операндов.
Но в микроконтроллере есть ещё и другие регистры – хранящие настройки разных периферийных устройств (портов ввода/вывода, например). С ними в основном и имеет дело программист. Например регистр PORTB, хранящий состояние выводов (пинов), или регистр DDR, хранящий настройки, находятся ли выводы (пины) в состояние входа или выхода.
Конфигурировать регистры будем булевыми операциями – AND (&) и OR(|).
Ну, говорить о том, что представлять содержание регистра удобнее всего в шестнадцатеричной или двоичной системе не будем.
Также умолчим о возможности калькулятора (вид->инженерный) переводить числа между разными системами
.
Вот таблица истинности – правила двоичной арифметики, ну это уж почти всем известно
Ну раз регистр это просто ячейка, например, из 8 бит, то выставим в регистре с именем PORTB восемь единичек:
PORTB = 0b11111111; (или
PORTB = 0xFF;)
Или все нули:
PORTB = 0b00000000; (или
PORTB = 0x00;)
А теперь, как выставить 1 в первом бите (обратите внимание на нумерацию битов в регистре – начинается 0), не изменив состояние других – при помощи OR (операция выполняется побитово):
PORTB = 0b00000001; (исходное состояние)
PORTB |= 0b00000010; (выставляем 1 в первом бите и теперь PORTB содержит 0b00000011)
PORTB |= 0x02; (тоже самое)
Можно убедиться, что 0 не изменяет состояния исходного бита, а 1 делает любой исходный бит 1 – см. таблицу истинности OR(|).
Как же выставить 0 в любом бите – при помощи AND
Выставляем 0 в первом бите, не изменив состояние других – при помощи AND (операция выполняется побитово):
Операция ~ изменяет все биты на противоположные
PORTB = 0b00000011; (исходное состояние)
PORTB &= ~0b00000010; (выставляем 0 в первом бите и теперь PORTB содержит 0b00000001)
PORTB &= ~0x02; (тоже самое)
Можно убедиться, что 1 не изменяет состояния исходного бита, а 0 делает любой исходный бит 0 – см. таблицу истинности AND(&).
Вот целый курс по программированию МК AVR “правильно” таким hard core способом, который в общем то и используют настоящие разработчики (customelectronics.ru)
Зажжем диод на ардуино, заодно попрактикуемся с регистрами.
Заглянув в datasheet на микроконтроллер ATmega8 семейства AVR (да, да, именно такой и в вашей ардуине), в ужасе ничего не понимаешь понимаешь, что выходы соответствуют трем портам B, C, D – PB0-5, PC0-5, PD0-7. В Arduino эти названия переименованы в цифровые выводы D0-D13 и аналоговые входы A0-A5.
Выводы управляются регистрами PORTх и DDRх.
Например, вывод PB5 управляется пятым битом в регистрах PORTB (состояние вывода – 0 или 1, 0В или 5В) и DDRB (настройка вывода – на вход(0) и выход(1));
Итак, чтобы подать 1 (5В) на 13 пин ардуино (PB5):
Надо настроить пин на работы в режиме выхода DDRB | = 0b0010000; (тоже самое, что pinMode(13,OUTPUT))
Выставить 1 в 5 бите регистра PORTBPORTB |=0b0010000; (тоже самое PORTB |=1<<5; или digitalWrite(13))
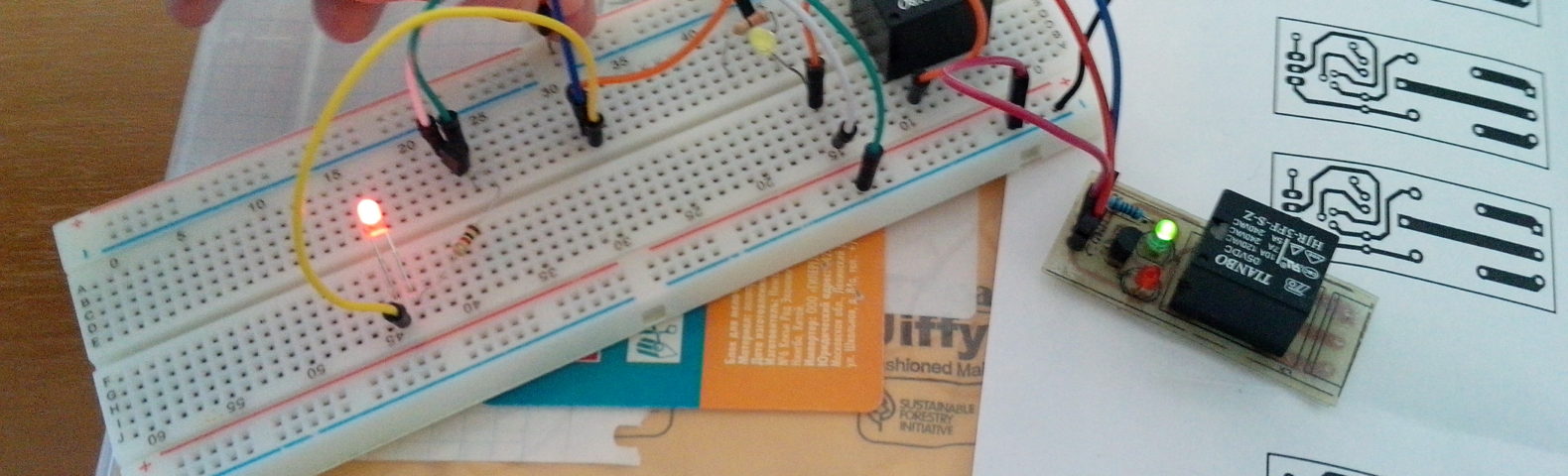
Делаем с учениками небольшое электронное устройство – плату-коммутатор с управлением от Arduino.
Плата должна включать/выключать (коммутировать) большие нагрузки во внешней цепи (например, управлять лампочкой в сети 220В или электродвигателем в 12В сети автомобиля).
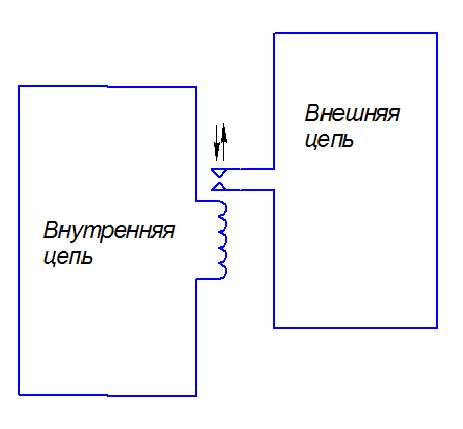
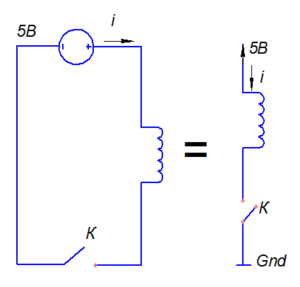
В качестве коммутирующего элемента (ключа) будем использовать электро-механическое реле. В нем контакты замыкаются под действием магнитной силы, только магнит там не обычный (постоянный), а электромагнит, работающий вот так:
Итак, пропуская ток по катушке нашего реле можно притягивать металлические контакты друг к другу, тем самым замыкая/размыкая внешнюю цепь.
Только вот кто будет пропускать или не пропускать ток по катушке – для этого нужна ещё одна цепь (внутренняя).
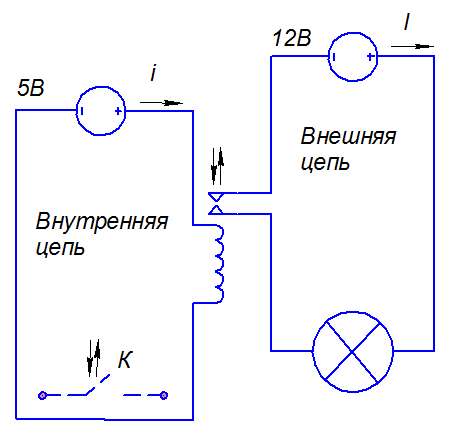
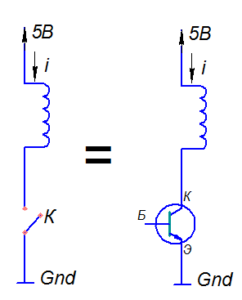
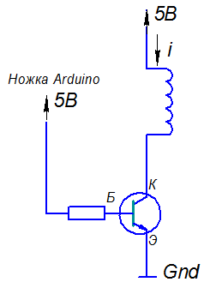
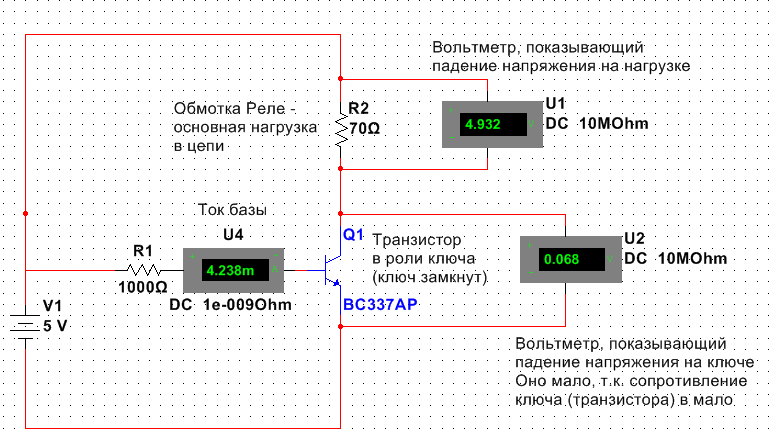
Поскольку ножка Arduino не способна самостоятельно запитать катушку реле, запитаем катушку (обмотку) от отдельного источника. Обмотка и этот источник образуют отдельную цепь (мы назвали её внутренней), которую необходимо замыкать/размыкать каким-то ключом. Этим ключом будет служить транзистор (биполярный), управляемый ножкой Ардуино.
Транзистор – это такой электронный прибор с изменяемым сопротивлением (как потенциометр, например).
Ну вот, скажите вы, нужен ключ, а тут какое-то сопротивление, еще зачем-то и переменное.
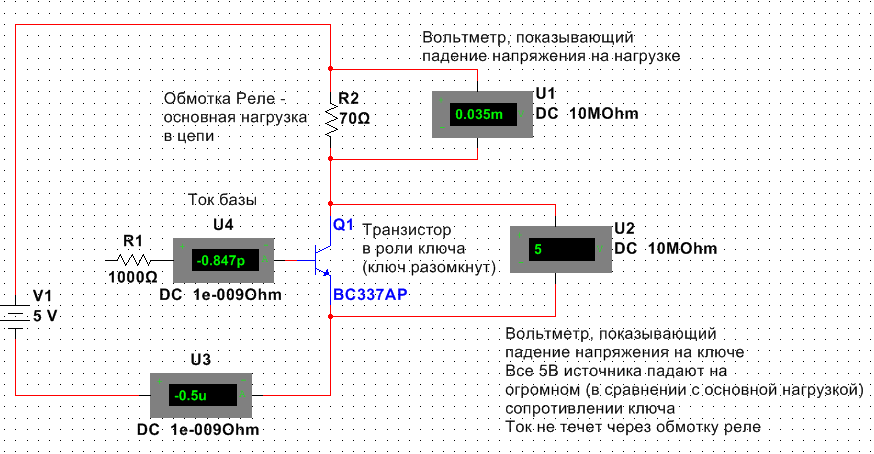
Ну так замкнутый ключ – это почти нулевое сопротивление, разомкнутый – почти бесконечное.
Транзистор умеет менять свое сопротивление в этих (почти) пределах.
Для взятого транзистора (bc337) ток в 5 мА, текущий через Базу (можно сравнить Базу с управляющим движком потенциометра или рукояткой ключа), делает сопротивление транзистора на участке Э-К (Эмиттер-Коллектор) практически нулевым.
Ключ разомкнут
Ключ замкнут
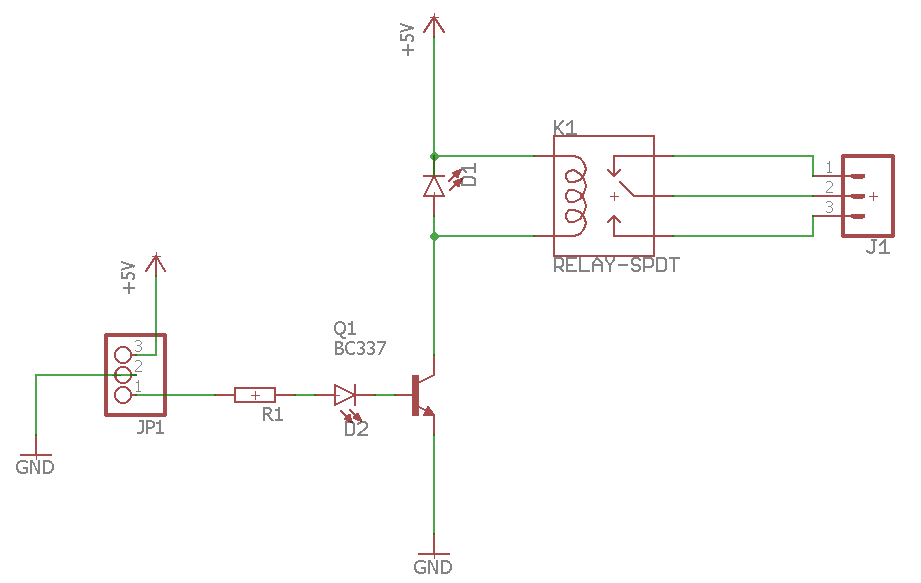
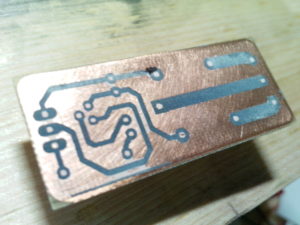
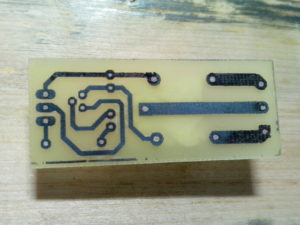
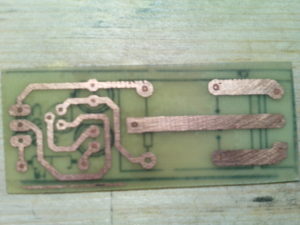
Электрическую схему разработаем в EagleCAD (бесплатная версия для плат, меньших 120х80мм). Там есть привязка электрической схемы к проектируемой плате. Электрическую схему можно смоделировать в Multisim (есть бесплатная версия для студентов).
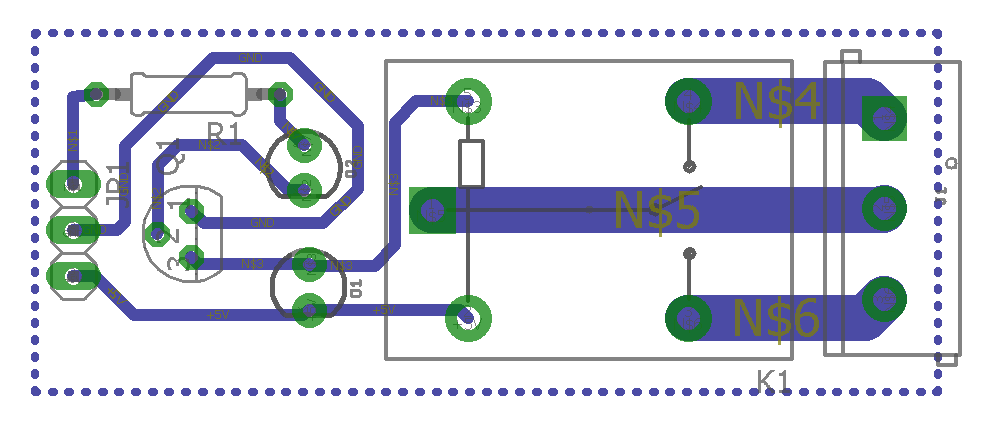
Толщины дорожек 0,5мм, диаметр отверстий 0,8-1мм.
Кстати, хорошие уроки по Eagle – easyelectronics.ru (уроки по Eagle)
Печатаем рисунок на глянцевой фотобумаге 85г/см и дальше при помощи технологии джедайского утюга или ЛУТ (описание ЛУТ на easyelectronics.ru) переносим тонер на предварительно зашкуренную и обезжиренную ацетоном медь и травим в хлорном железе.
На видео видно, что красный защитный диод загорается только в момент отключения цепи, когда ток через обмотку реле перестает течь. Почему же он горит? Дело в том, что обмотка-катушка обладает свойством индуктивности, то есть сопротивляется изменению тока через себя. При попытке разомкнуть цепь и уменьшить ток до нуля, катушка некоторое время будет пытаться сохранить течение тока за счет запасенной в ней энергии магнитного поля. Катушку можно сравнить с маховиком, которого и разогнать и остановть мгновенно не получается. Такая попытка сохранить ток в начальный момент в уже разомкнутой цепи приведет к возникновению очень большого напряжения на катушке (как на источнике ЭДС), что может вызвать разряд в воздушном зазоре ключа, пробой транзистора. Поэтому на этот случай надо предусматривать разрядную цепь с диодом.