Author: finereader














Программная часть готового проекта :
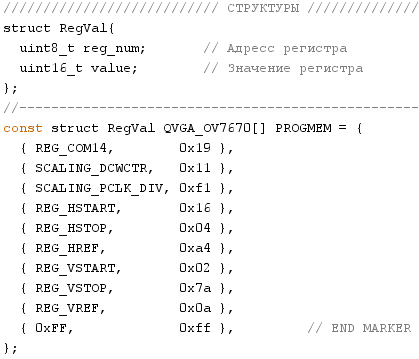
- код для платы Arduino, получающей по COM-порту от компьютера пакет с тремя углами поворота серводвигателей
- программа в среде Processing, работающая на ПК, которая сначала определяет координаты мишени (обрабатывая изображение с камеры), а затем рассчитывает углы для Arduino

Робот манипулятор. Алгоритм управления


Создадим систему управления роботом и разработаем алгоритм управления его движением.
Задача системы управления (СУ) – определять ошибку между требуемым и текущим положениями схвата робота, рассчитывать перемещения отдельных звеньев и выдавать управляющий сигнал на серво-двигатели.
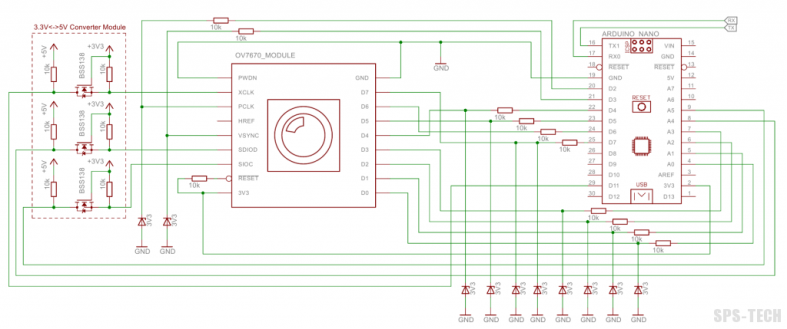
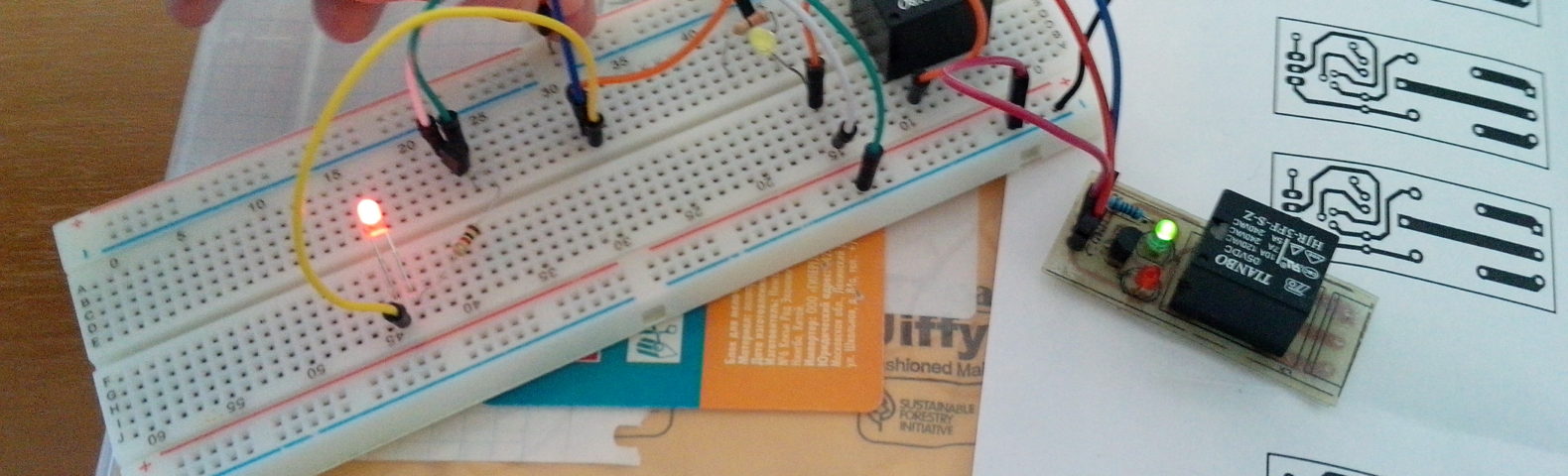
Наша СУ будет состоять из сервоприводов (SG-90), платы Arduino и ПК с программой, получающей координаты цели и рассчитывающей требуемые углы поворота серв.
Общий алгоритм управления Роботом такой:
Определить требуемое положение схвата: схват должен придти в точку цели. Цель можно указать мышкой, написав программу на компьютере (например в Processing) или обработать изображение с камеры, висящей над рабочей зоной робота, выделив на нем объект нужного цвета или формы.
Рассчитать требуемые положения звеньев робота, т..е. углы поворота двигателей. Ввиду простоты схемы робота, сильно напоминающей треугольник, нам понадобятся некоторые знания геометрии (теорема Пифагора, синусы, теорема косинусов). В нашей программе на Processing, определив координаты цели, сразу же рассчитаем и все углы, высвобождая этим ресурсы Arduino.
Передача рассчитанных требуемых углов в Arduino. А дальше есть библиотека Servo и команда Servo::write(угол). Но попытка просто использовать эту функцию может привести к тому, что в случае требования повернуться на большой угол (например 180 град), серво-двигатель попытается мгновенно придти в указанное положение. Робот имеет некоторую массу и обладает инерцией, а это значит, что он будет сопротивляться изменению своей скорости. Силы инерции могут сорвать зубья шестеренок сервы. Необходимо попытаться сгладить переход между положениями, растянув его во времени.
Разобьем весь переход на несколько временных шагов и на каждом будем двигаться на долю, пропорциональную (составляющую часть) ошибке: Kp*error. Это еще называется пропорциональный регулятор (П-регулятор).
Итак, микроконтроллер, получив значение требуемого угла поворота, рассчитает ошибку положения (текущее положение доступно из Servo::read()) и за некоторое количество тактов плавно переместит робота. От коэффициента пропорциональности зависит плавность.
Сейчас о том, как рассчитать требуемые положения звеньев робота.
Тут понадобятся базовые знания геометрии о прямоугольном треугольнике, соотношении его сторон в теореме Пифагора, откуда берутся синусы и косинусы.
Сведения из геометрии
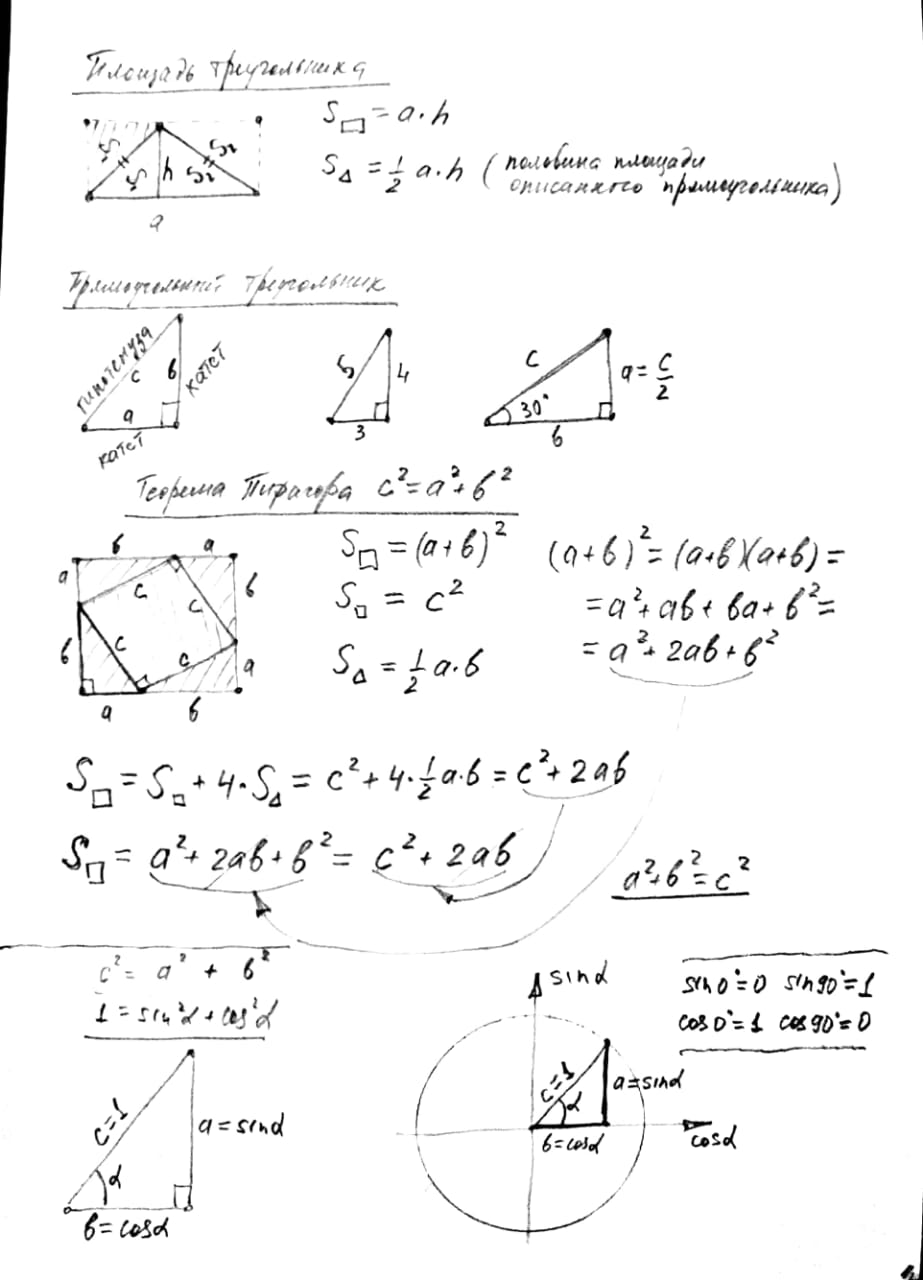







Программа на Processing с наглядной демонстрацией того, что sin(А) – это просто средство расчета противолежащего углу А катета.
Робот имеет 3 степени свободы (3 цилиндрических шарнира – 3 оси вращения), что позволяет перемещаться схвату по трем координатам xyz, но мы ограничимся плоскостью xy.
На виде в плане (сверху то есть) мы видим схему робота и точку положения мишени с координатами xy, которые нам известны. Зная координаты, рассчитываем общий вылет робота – С (гипотенуза = сумме квадратов катетов). Угол поворота основания рассчитывается как дуга, соответствующая sin (y/c).


На профильном виде А-А, соединив точки центров серв и схвата, получим треугольник со сторонами L1 L2 R. Длина стороны R рассчитывается из прямоугольного треугольника СhR (где h-высота основания робота).
Но как быть с треугольником L1 L2 R- все стороны мы знаем, а углы нет. Оказывается, в любом треугольнике, имея длины его сторон можно найти его углы по теореме косинусов (или сторону, лежащую напротив известного угла, образованного двумя известными сторонами).
Теперь напишем модель робота в среде Processing и протестируем алгоритм.
Программа, как и Arduino, должна иметь две обязательные функции – setup() и draw(бесконечный цикл).
Создаем глобальные переменные для хранения размеров звеньев робота и текущих углов поворота этих звеньев, а также окно 800х600:
/* Переменные с размерами робота*/
float c = 0.0; //вылет робота
float h = 80; //высота основания
float L1 = h*3; //плечо
float L2 = h*4; //предплечье
/* Переменные с углами робота*/
float alfa;
float Beta,Beta2;
float gamma;
float tau,tau2;
void setup(){
size(800,600,P3D);
}
В функции draw() на каждом такте перерисовки экрана :
– отображаем мишень по координатам мыши
– переносим систему координат в удобное место для отрисовки первого звена (основания)
– рассчитываем положения звеньев робота
– отрисовываем звенья основания, плеча и предплечья (с поочередным переносом систем координат)
void draw(){
//Очищаем окно
//background(#EAD5D5);
/*Рисуем цель-мишень по координатам мыши*/
drawTarget();
//Перенос системы координат
//и поворот
//Y /\
//X >>>
translate(width/4,height/2+height/4);
rotateX(radians(180));
/* Рассчитываем положение робота - углы*/
computeRobotpos();
//Рисуем Основание Робота
drawBase();
//Рисуем Плечо Робота
drawArm();
//Рисуем Предплечье Робота
drawForeArm();
}
Функция расчета положений звеньев – computeRobotpos() – смотри картинку выше
void computeRobotpos(){
//Вылет Робота
float c = (mouseX-width/4);
float R = sqrt(h*h + c*c);
alfa = asin(h/R);
Beta = acos( (L1*L1 + L2*L2 - R*R) / (2*L1*L2));
gamma = acos( (L1*L1 + R*R - L2*L2) / (2*L1*R));
tau = gamma - alfa;
}
Функции отрисовки звеньев нехитрым образом переносят СК в точку начала следующего звена, поворачивают её на рассчитанный угол и командой line() чертят линию вдоль оси Х, по длине совпадающую с длиной данного звена:
void drawBase(){
//Точка центра
strokeWeight(3);
stroke(255,255,0);
point(0,0);
strokeWeight(3);
stroke(255,255,0);
line(0,0,0,h);
strokeWeight(15);
point(0,h);
drawlocalCS();
}
void drawArm(){
//переносим систему координат
//в точку начала звена
translate(0,h);
rotateZ((tau));
strokeWeight(3);
stroke(255,255,0);
line(0,0,L1,0);
strokeWeight(15);
point(L1,0);
drawlocalCS();
}
void drawForeArm(){
//переносим систему координат
//в точку начала звена
translate(L1,0);
rotateZ(-(PI-Beta));
strokeWeight(3);
stroke(255,255,0);
line(0,0,L2,0);
strokeWeight(15);
point(L2,0);
drawlocalCS();
}